Estas navidades me compré un iPad Pro de 12.9» y la verdad es que me ha cambiado la forma de trabajar. El uso principal que le doy es como libreta, tomando notas con el Apple Pencil. Este accesorio es el que realmente aporta un cambio radical a la tableta pues permite escribir y dibujar sobre la misma con una precisión y versatilidad tremendas, y sin latencia perceptible.
Pero independientemente de la tecnología que hay detrás del Apple Pencil, creo que en esta ocasión el diseño del mismo deja mucho que desear, y por varios motivos:
El necesitar un mini adaptador lighning para cargarlo es realmente engorroso y anacrónico.
La opción de cargarlo por el puerto lightning del iPad deja al lápiz en una posición muy expuesta y un movimiento desafortunado puede romperlo fácilmente.
La tapita, aunque tiene un imán que la mantiene unida al lápiz, salta y rueda con facilidad
El lápiz es totalmente cilíndrico, por lo que puede rodar por la mesa hasta que encuentra un obstáculo – o el suelo.
Y, lo que peor llevo… ¿dónde lo guardas mientras no lo estás usando? Hay fundas que llevan incorporado un especio para el lápiz, pero añaden mucho peso a un iPad ya de por si muy pesado.
Para solucionar algunas de estas pegas le he añadido una mejora. A algunos applemaníacos seguro que les parecerá un sacrilegio alterar así un producto Apple, pero pienso que si Steve Jobs levantase la cabeza y viese las pegas anteriores le iba a caer una colleja a algún ingeniero/diseñador que otro…
Lo que he hecho ha sido tan sencillo como pegarle unos pequeños imanes de neodimio (que creo saqué de unos lectores de DVD) tanto al lápiz como a uno de los lados del iPad. Son tan potentes estos imanes que el lápiz queda muy firmemente fiajdo contra el lateral del iPad, y hace falta hacer una cierta fuerza para separarlo. Con acercarlo ligeramente, el lápiz salta y se pega a los imanes.
Al principio lo pegué solamente con Superglue, pero luego decidí añadirle un pequeño borde de resina epoxi, que sobresale ligeramente y lo afea, pero no se nota demasiado. Quizás con el Superglue hubiese sido suficiente.
Además, con los imanes el lápiz ya no rueda por la mesa.
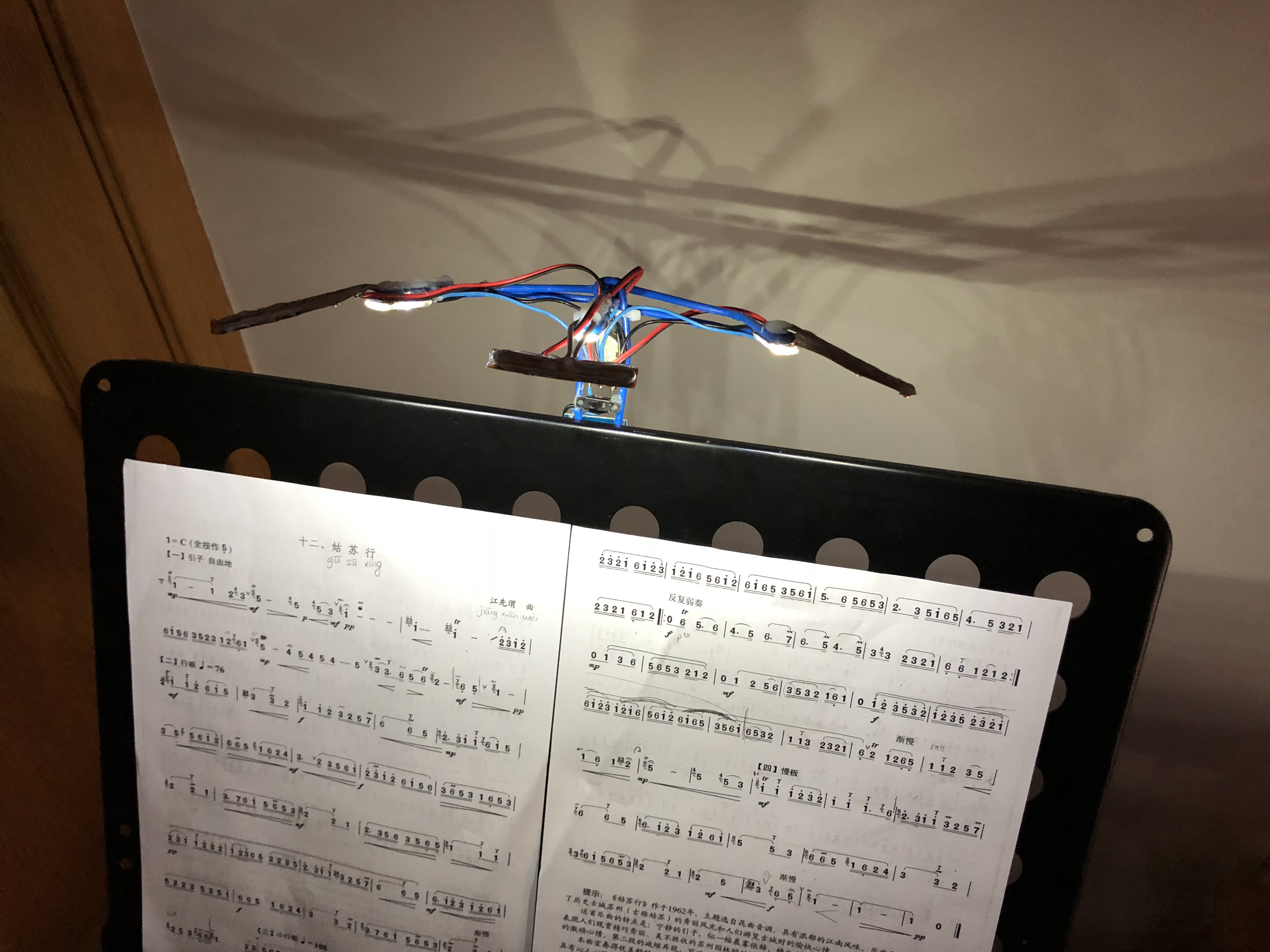
Para un concierto en el que toqué recientemente nos hacía falta tener luces en los atriles ya que en algunas piezas se proyectaban vídeos mientras tocábamos y la luz era insuficiente para poder leer la partitura.
Así que decidí construirme una luz de atril, con batería recargable por USB.
Para fijar la lámpara (realmente, tres lámparas LED) al atril, preví un par de imanes de neodimio, que se pegan a cualquier superficie metálica (la mayoría de los atriles) de forma muy fuerte.
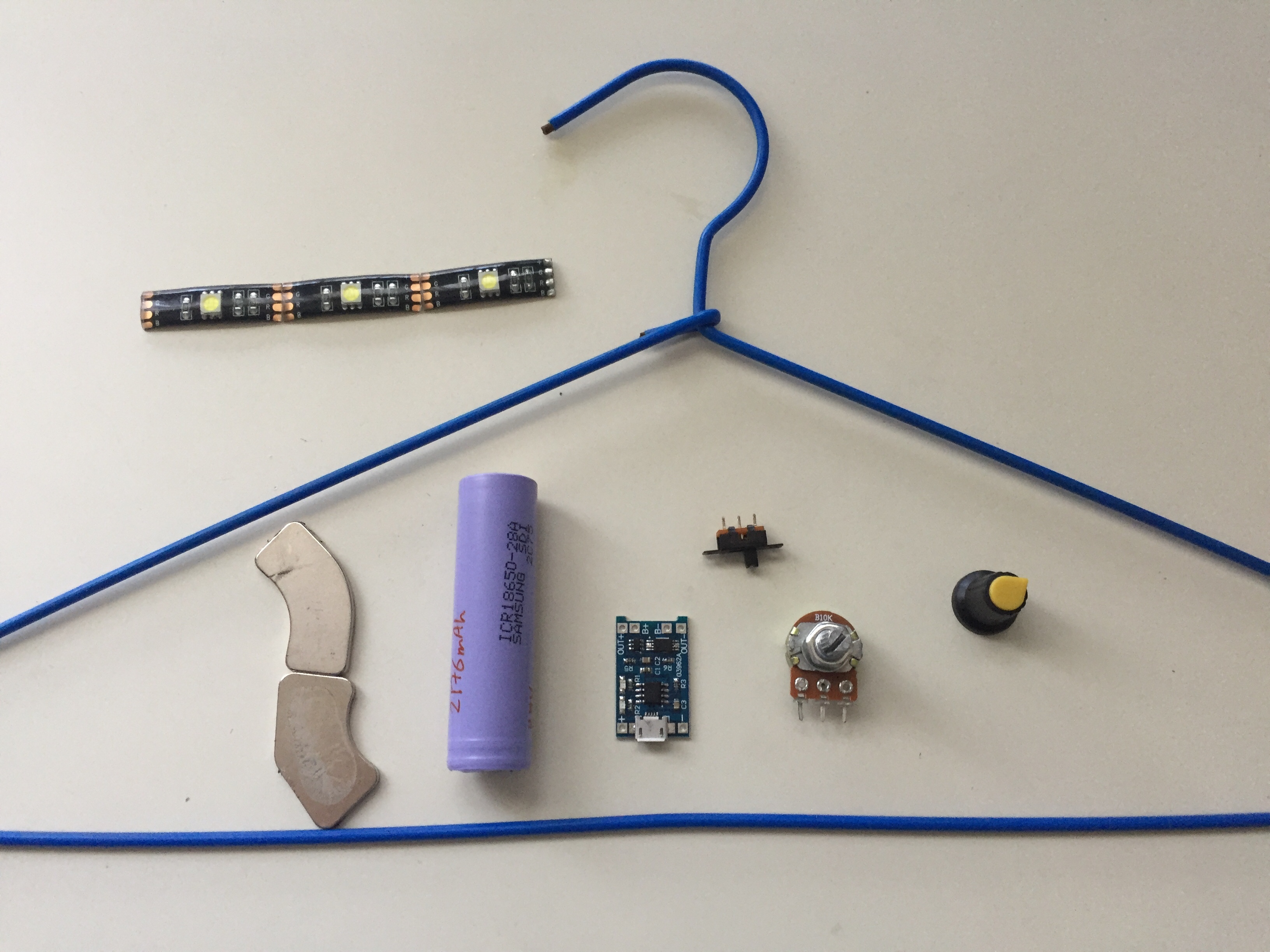
Material necesario:
Una percha
3 leds cortados de una tira led
Una batería de ion litio 18650 (sacada de la batería de un portátil)
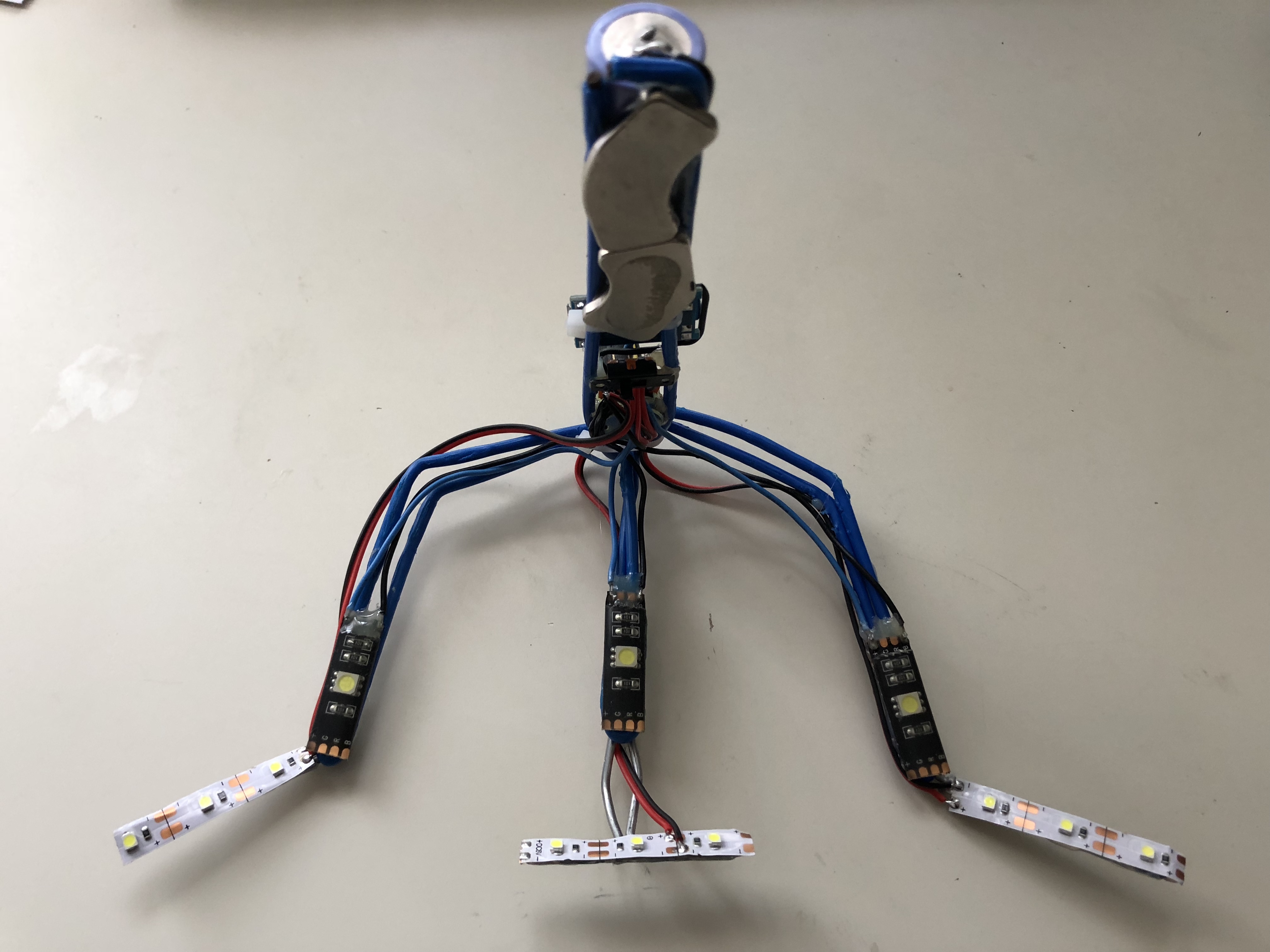
Realmente no hay mucho que contar. Con unos alicates enderecé y di forma al bastidor. Ojo, que el alambre de esta percha era muy grueso y por tanto excesivamente rígido y difícil de doblar.
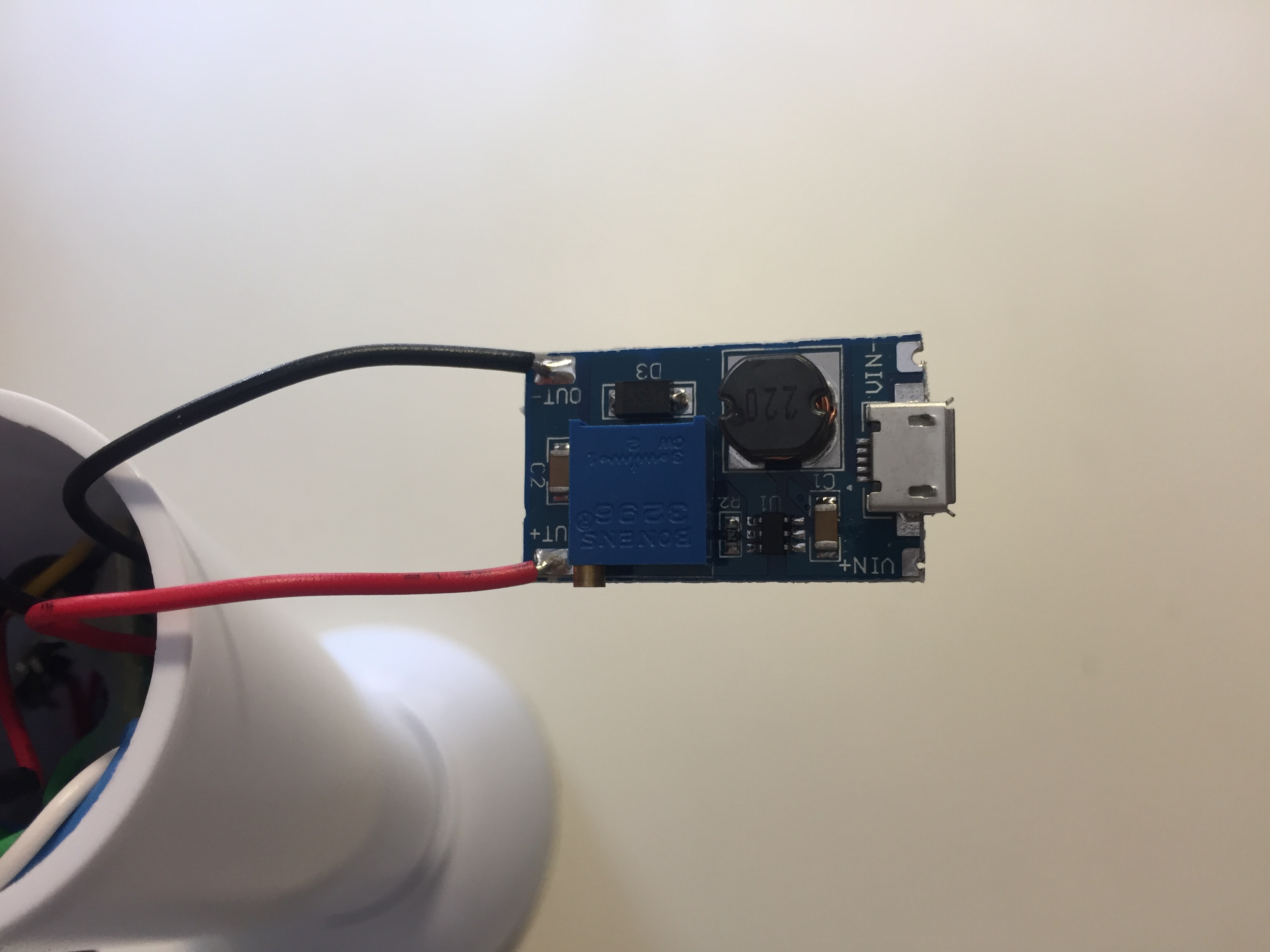
Luego soldé los cables correspondientes entre la batería y el módulo de carga, con la precaución de meter un tiempo antes la batería en el congelador, para que el calor de la soldadura no afectase al ión litio (estas baterías se llevan mal con el calor, y en algún sitio leí este truco).
Del módulo de carga soldé los cables al interruptor, y de este al potenciómetro, que alimentaba en serie a los tres leds.
En total unas 2 horas de una tarde de domingo.
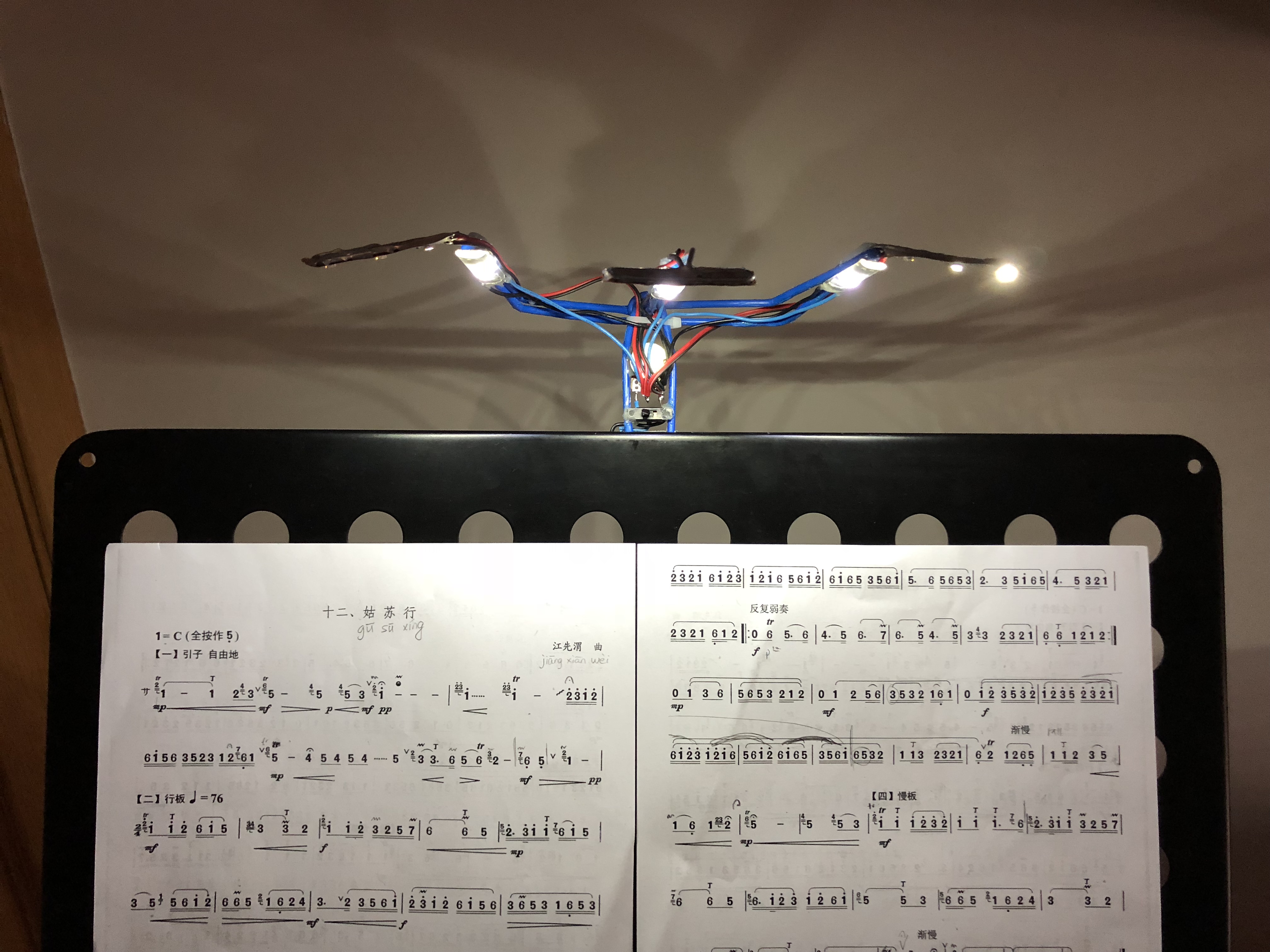
Añadido 24/4/2018
Hace unos días me sobró un poco de tira de led (y un ratito) y decidí ampliar la luz del atril:
He compuesto un popurrí de canciones de dibujos animados de los ochenta para coro, bajo eléctrico y batería.
Aquí se puede ver el vídeo con la partitura y mi voz haciendo -malamente- las cuatro voces. Y de fondo, los dibujos animados de lo que va sonando en cada momento (¡en ocasiones, superpuestos varios dibujos!):
Y aquí el vídeo con solo la partitura y la música sintetizada:
NOTA: Hice este arreglo sin ánimo de lucro. No he cobrado ni cobro por el arreglo, ni permito su uso con ese fin. Las canciones originales fueron compuestas por:
David el Gnomo: Javier Losada
D’Artacán: Guido y Maurizio de Angelis
Willy Fog: Guido y Maurizio de Angelis
Campeones: Música: Carmelo Carucci e Alessandra Valeri Manera; Letra Carlos Toro
He hecho un arreglo para coro (SATB), flauta travesera, chelo, bajo eléctrico y piano de Walking in the Air, la canción del corto de animación «The Snowman», de Howard Blake.
El vídeo con la partitura y dibujos de fondo puede verse aquí (voces e instrumentos sintetizados):
NOTA: Hice este arreglo sin ánimo de lucro. No he cobrado ni cobro por el arreglo, ni permito su uso con ese fin. La canción original fue compuesta por Howard Blake, en la película de animación The Snowman. Este arreglo está basado en la versión para piano y voz de Howard Blake, y parcialmente en la de coro de Audrey Snyder).
La respuesta de los «conservadores» […] parece reflejar el esquema clásico de reacción inducido por las novedades científicas: no es cierto (primera fase); aunque sea cierto, es una cuestión secundaria (segunda fase); es cierto, pero yo ya lo había dicho (tercera fase).
Telmo PievaniRepensar a Darwin, Investigación y Ciencia, enero 2016
Hace tiempo cayó en mis manos un altavoz Bose SoundDock de primera generación. Es un altavoz magnífico (y muy caro, unos 500 €), que se empleaba para reproducir música de un iPod o de un iPhone de las primeras generaciones (los que tienen conexión alargada, de 30 pines). El problema es que solo permite conectar uno de esos aparatos, ya antiquísimos, y que a ver quién usa aún uno… Además, en mi caso, la base estaba rota y ya ni siquiera tenía la clavija, por lo que estaba totalmente inservible. Pero, salvo que no había forma de conectarle un iPod o ningún otro dispositivo, el altavoz en sí parecía en perfecto estado…
Bose Sounddock
Así que me propuse arreglarlo. A continuación cuento todas las trastadas que le he hecho al altavoz, y cómo he llegado al resultado final, en el que tengo un altavoz perfectamente funcional, al que he añadido una entrada de audio por medio de una clavija de 2.5 mm, le he añadido bluetooth y un potenciómetro para regular el volumen. Ojo, que los primeros procedimientos que intenté no me funcionaron, pero los cuento también por si alguien se encuentra con los mismos problemas. Más adelante contaré cómo le he añadido una Raspberry Pi en la que he instalado el Google Assistant.
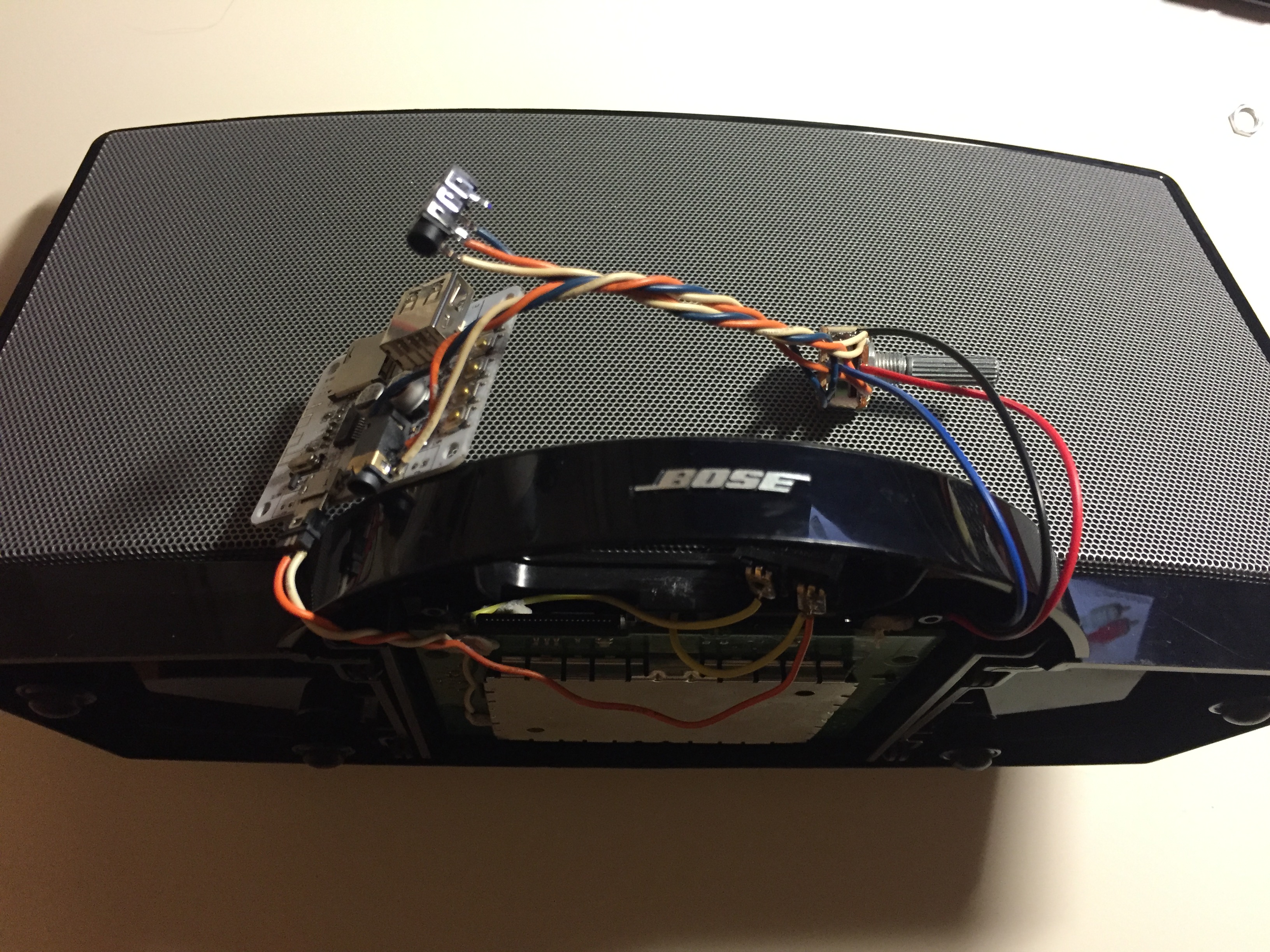
Pero antes, este es el resultado final:
Esta es la etiqueta que aparece en la base:
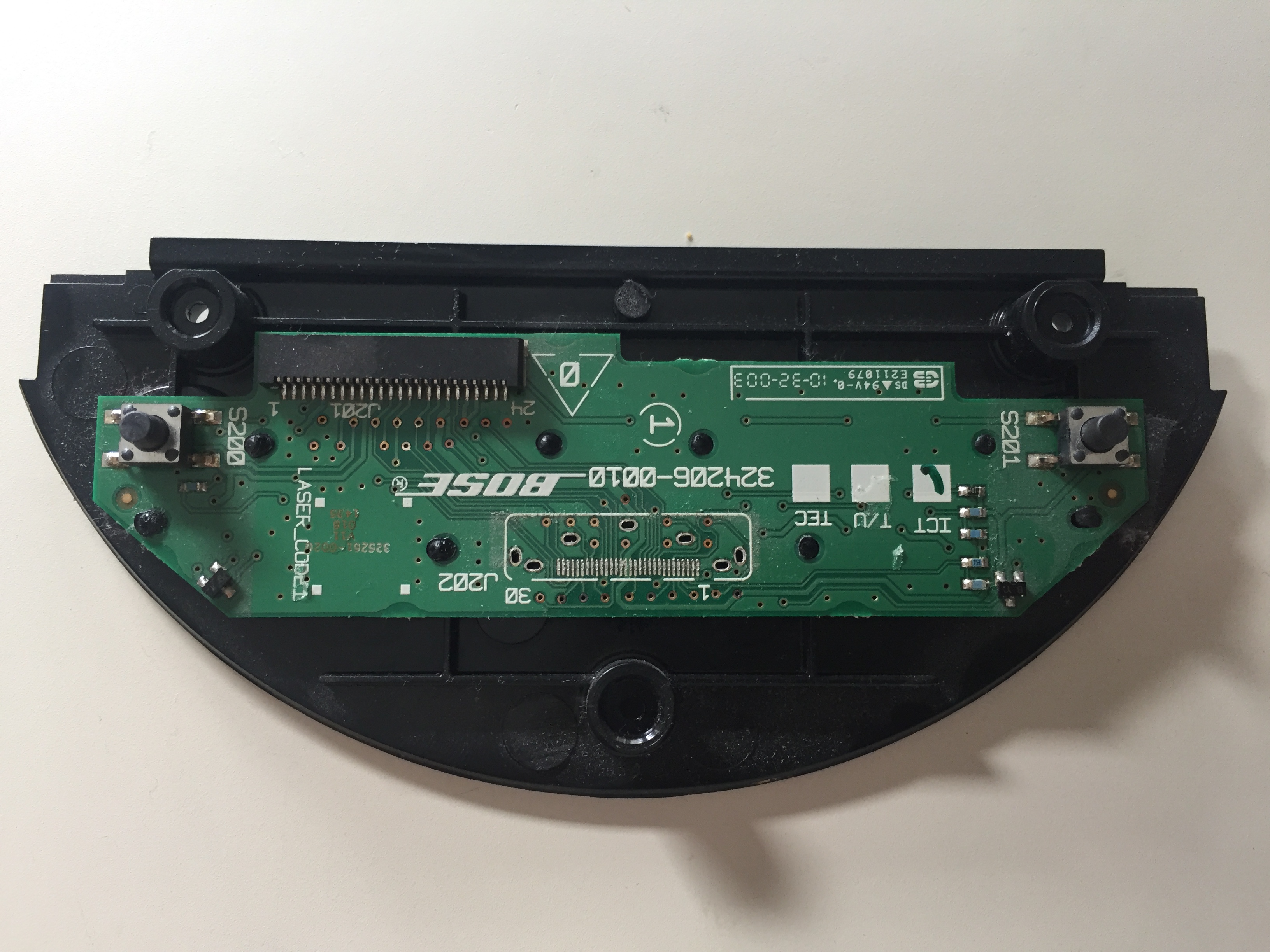
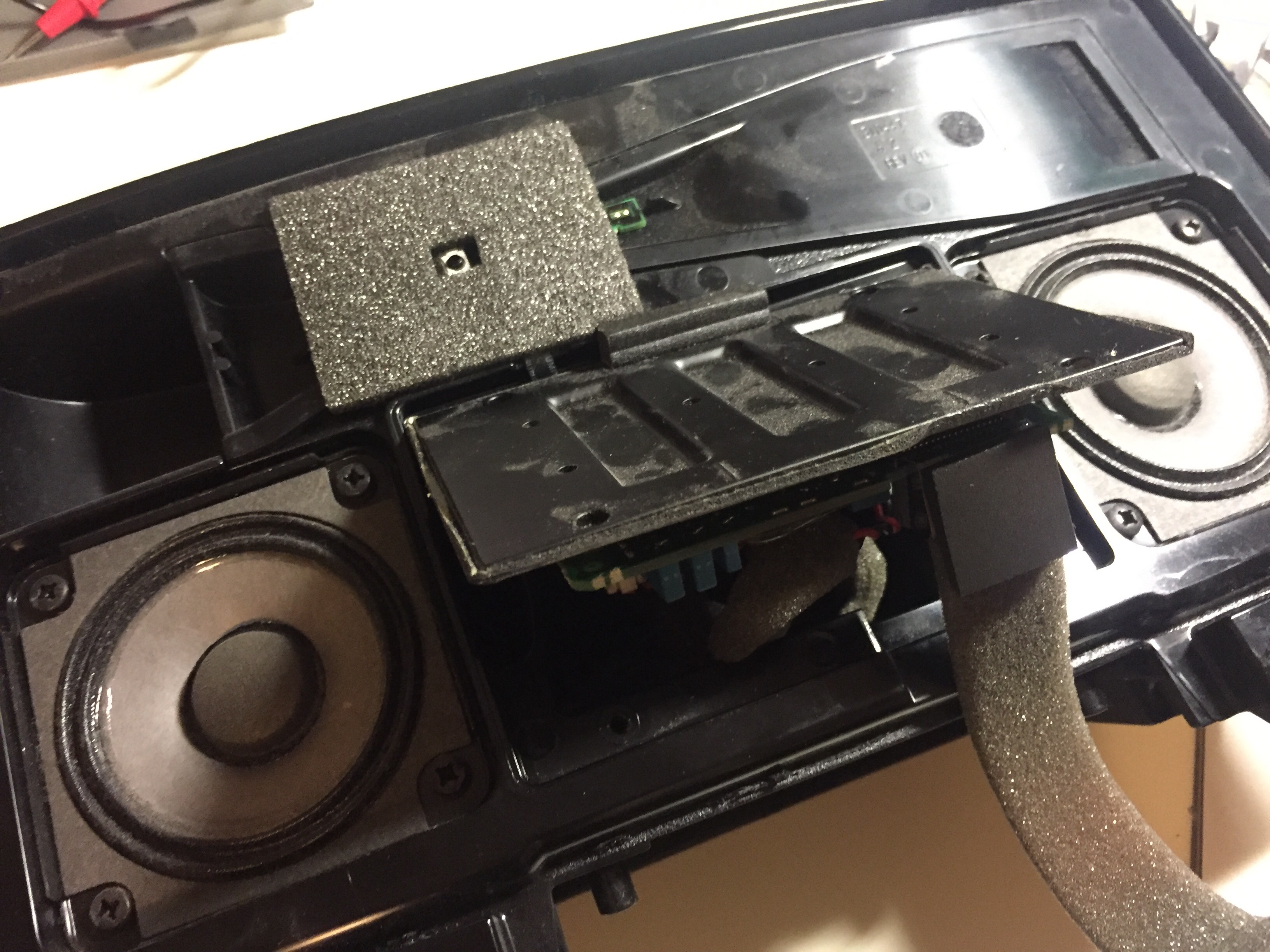
El frontal se demonta por medio de tres tornillos tor.
Podemos desconectar la banda, y luego hay que despegar el plástico negro:
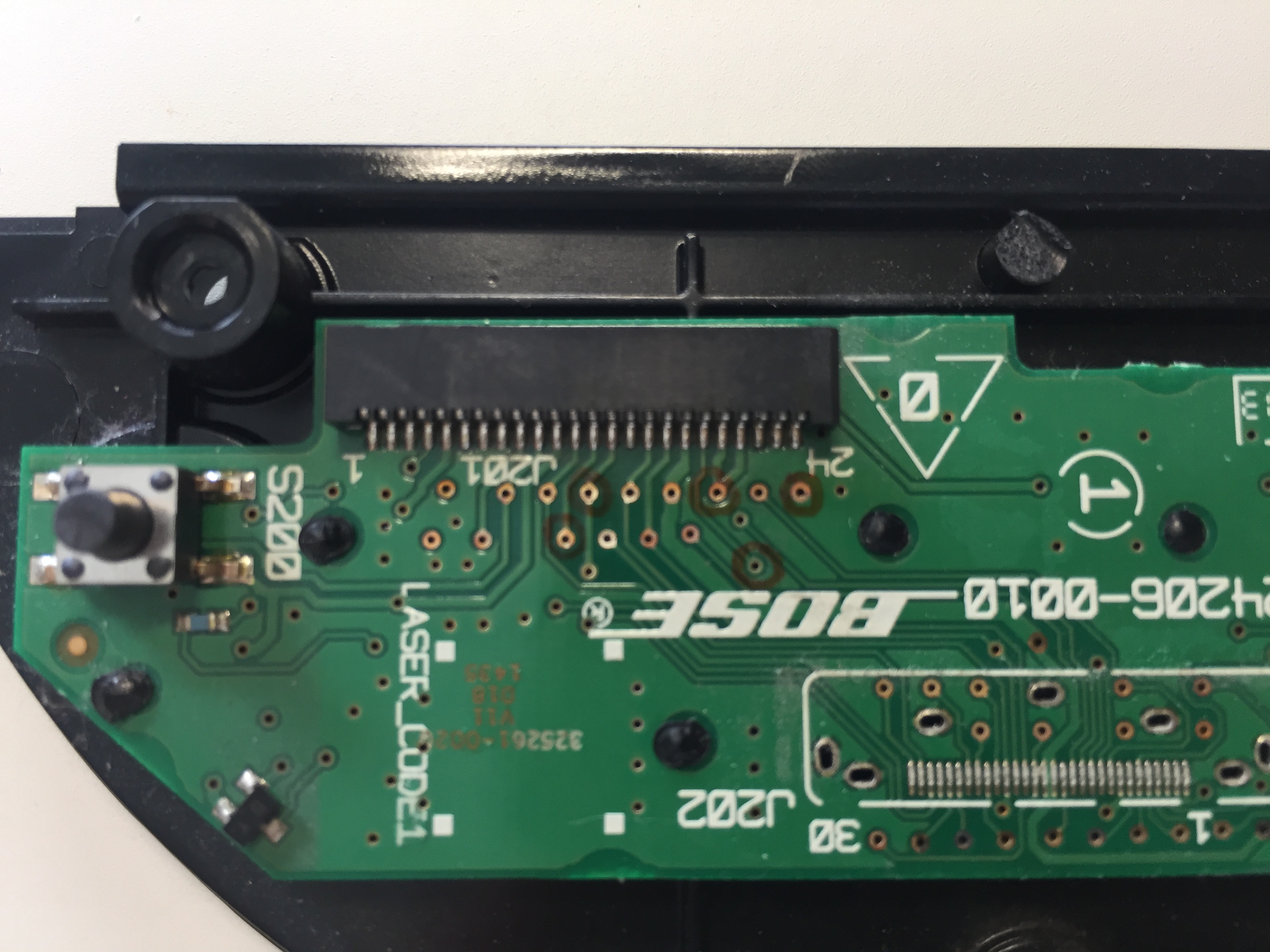
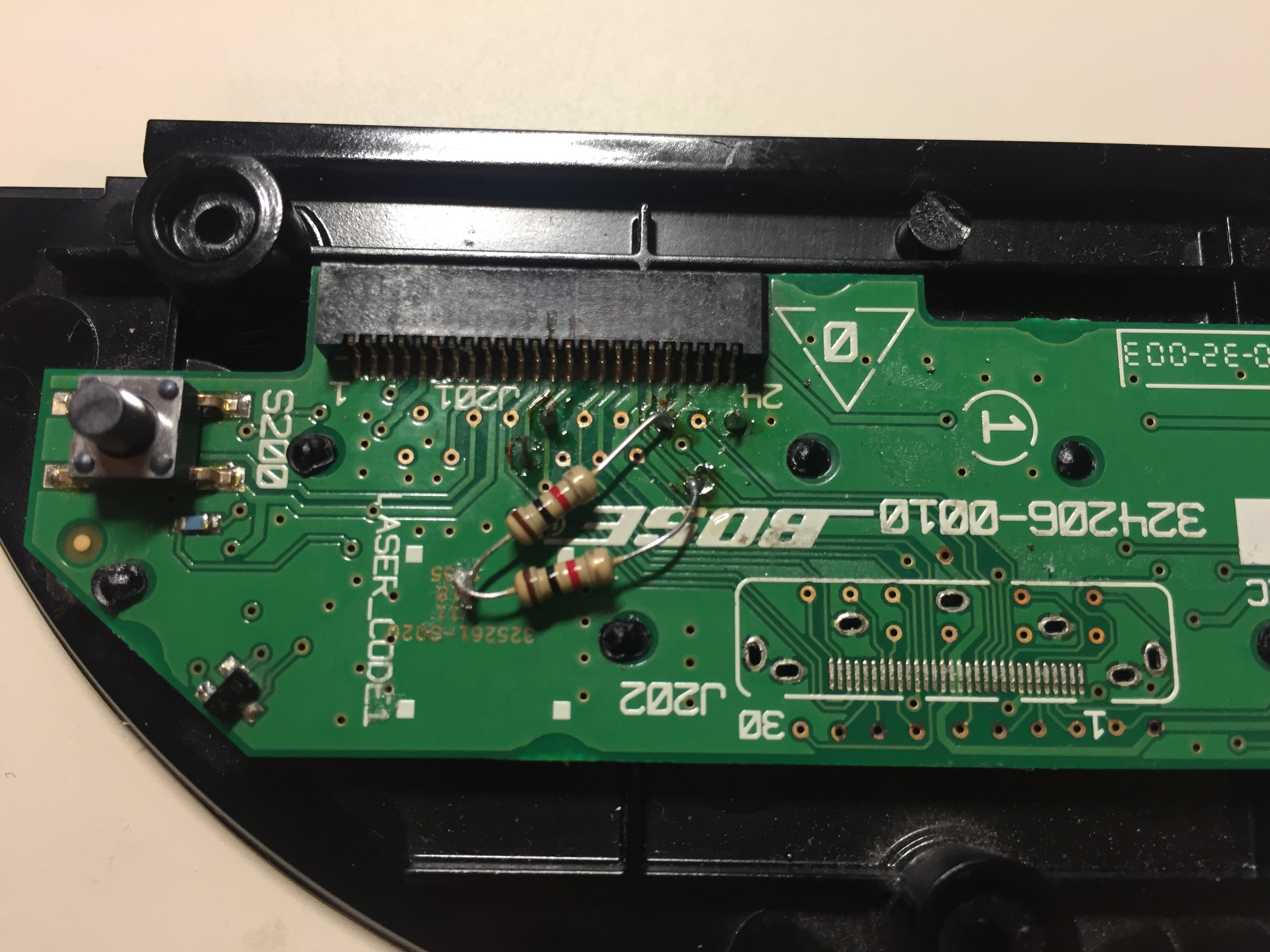
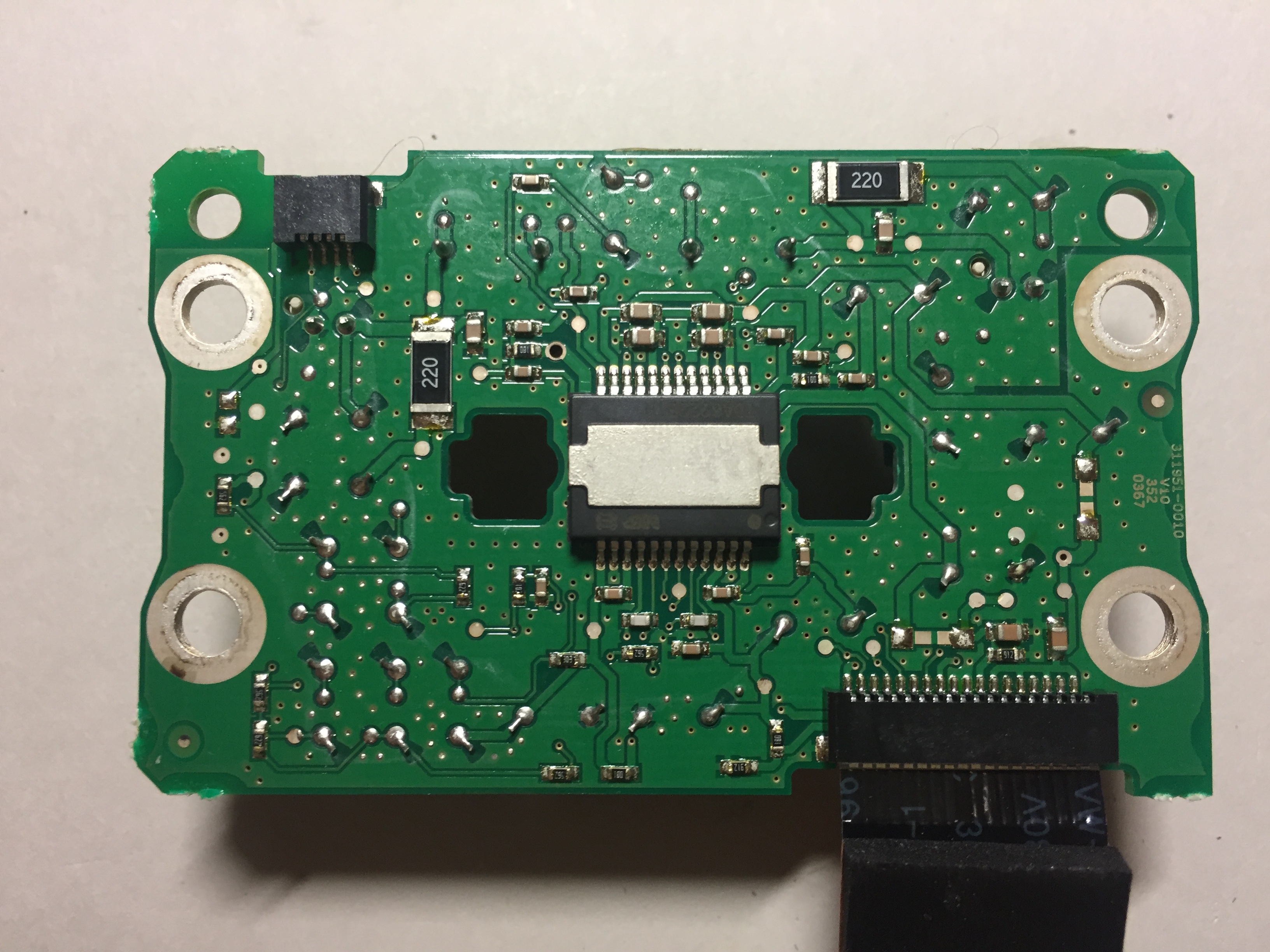
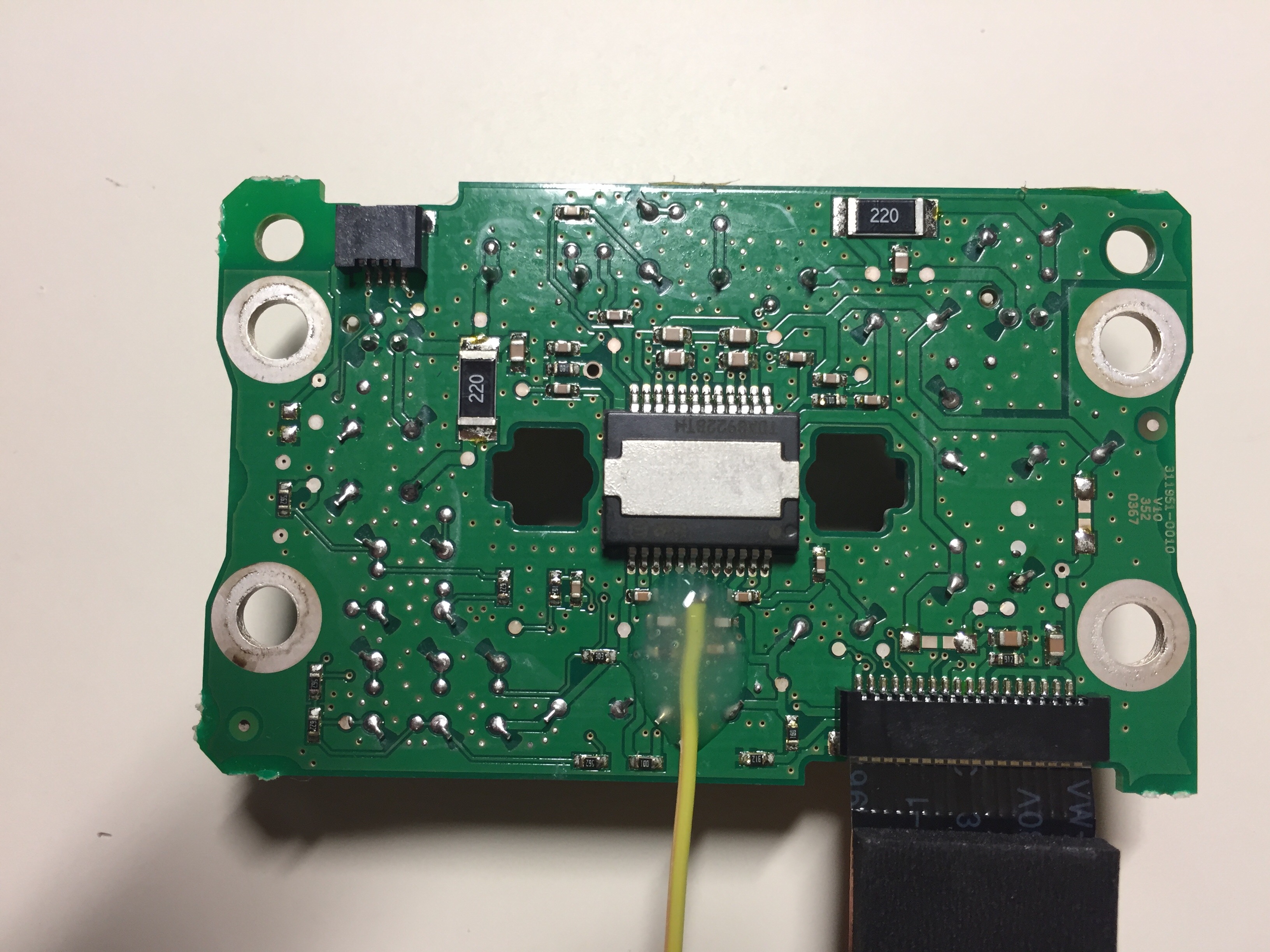
Buscando por internet hay varias personas que han «hackeado» este altavoz con el mismo propósito, bien por rotura de la clavija como es mi caso, o para añadirle una entrada auxiliar. Mike Kruckenberg parece que fue el primero en explicar cómo lo hizo. Hay también varios vídeos en Youtube. Tengo que decir de antemano que el procedimiento de Mike Kruckenber, que es el primero a seguir (por simplicidad), no me funcionó. Por un lado mi placa parece ser una versión más antigua que todas las otras que he visto, y además sospecho que tendría algún problema más. Pero al final lo conseguí con otro procedimiento que contaré más abajo.
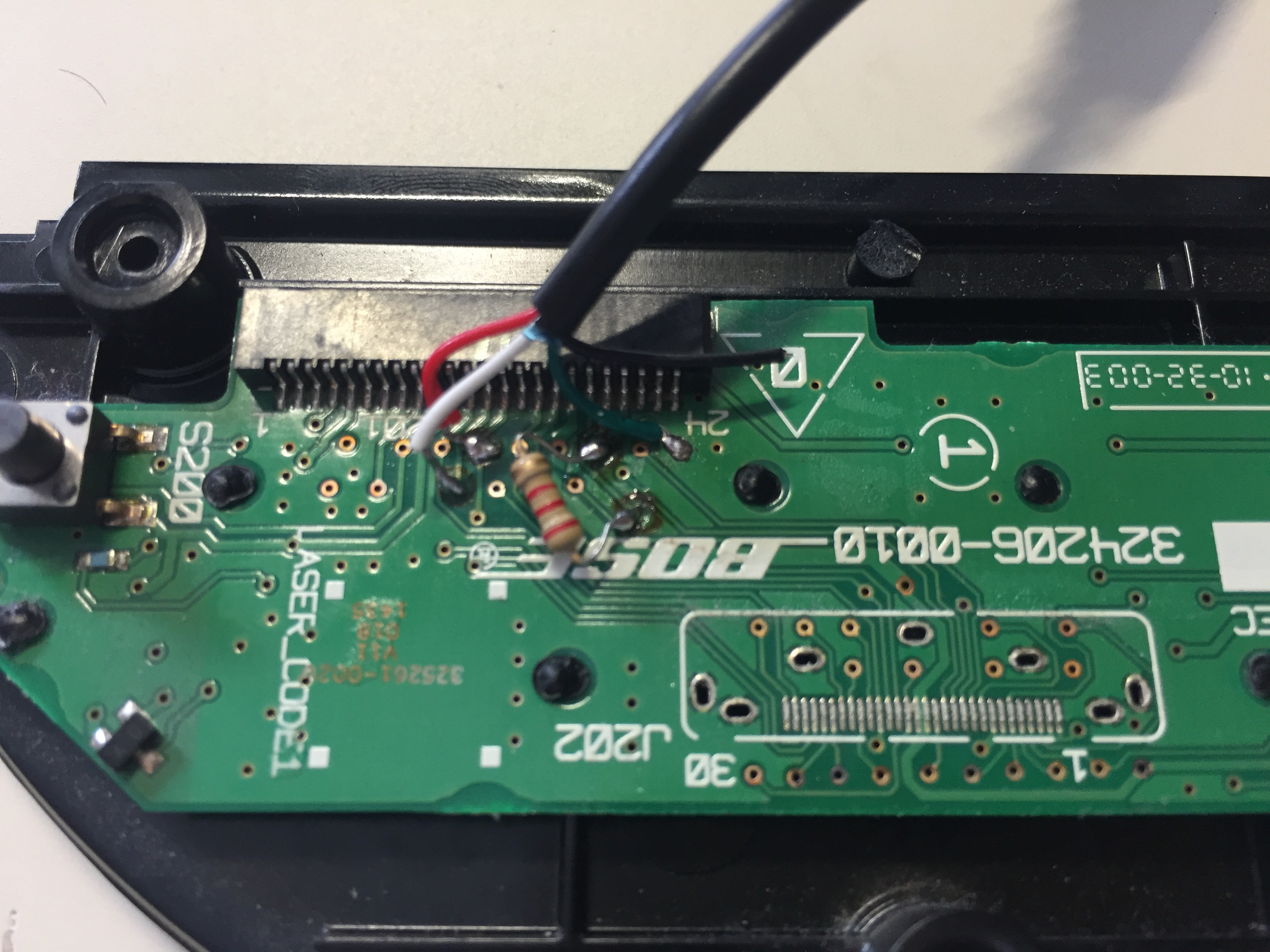
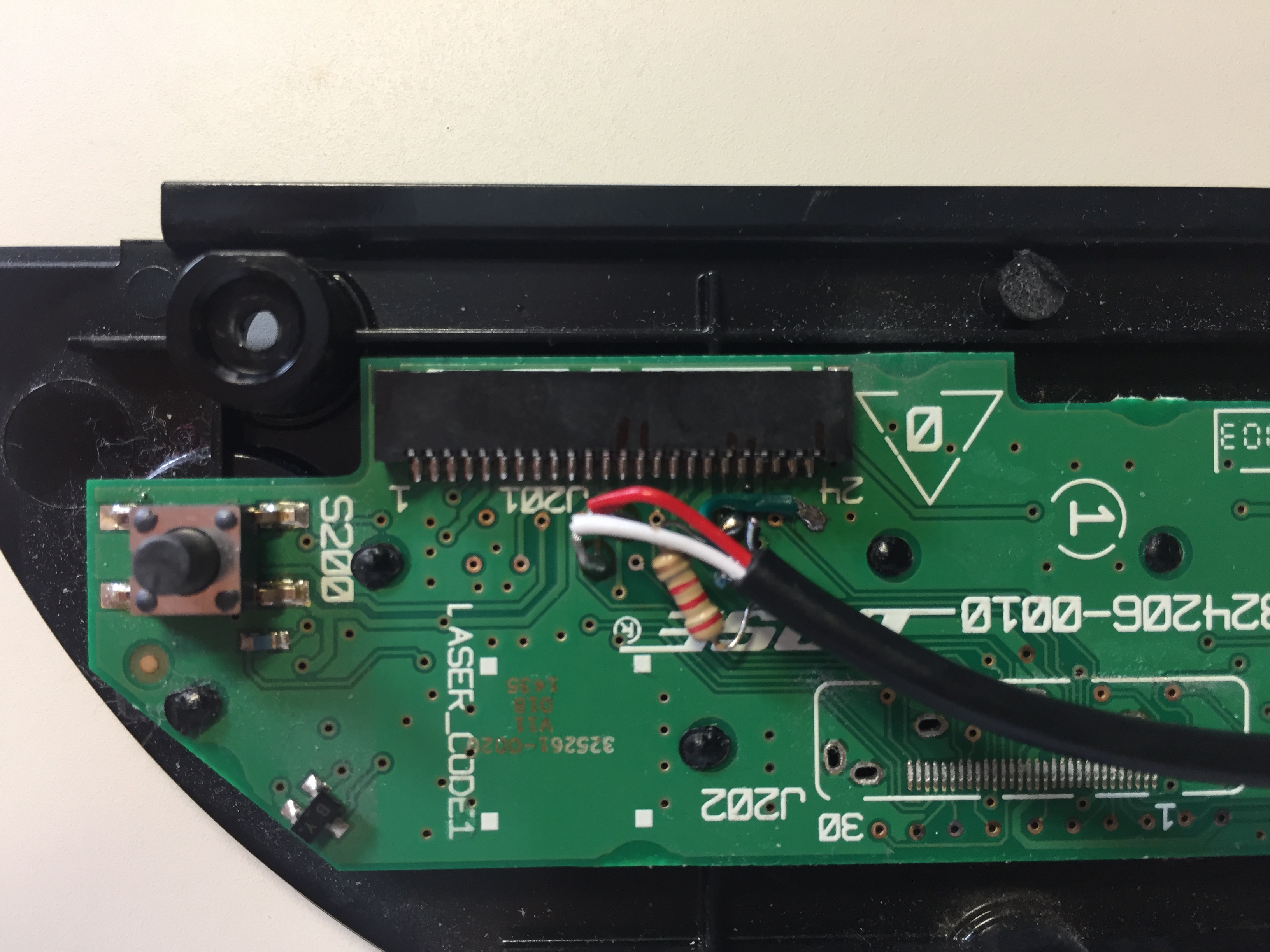
La idea de fondo es averiguar cuáles son los pines del iPod que mandan la señal de audio, y conectar ahí nuestra entrada. Son el pin 13 para audio izquierdo, el pin 14 para el derecho, y el 24 para tierra. Conectando ahí debería funcionar, pero hace falta un paso adicional pues solo mandando ahí audio el altavoz sigue sin funcionar. Al parecer, el iPod le indica por algún otro pin al altavoz que debe encenderse. No me entretengo a explicarlo (en el post de Mike Kruckenberg está muy bien explicado, y también en varios vídeos), pero su método no me funcionó. Aquí van las fotos de los intentos fallidos.
Otra prueba fallida:
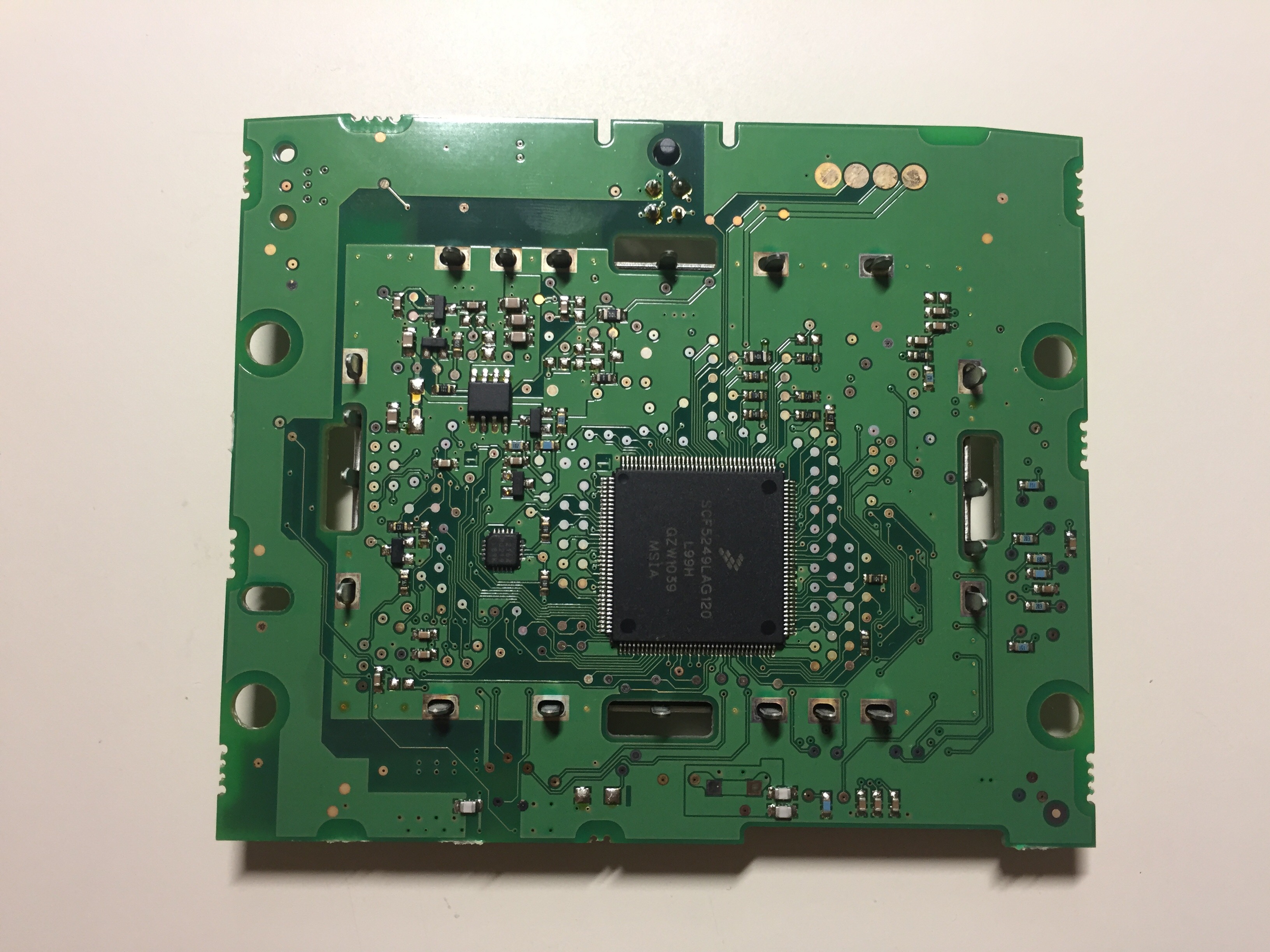
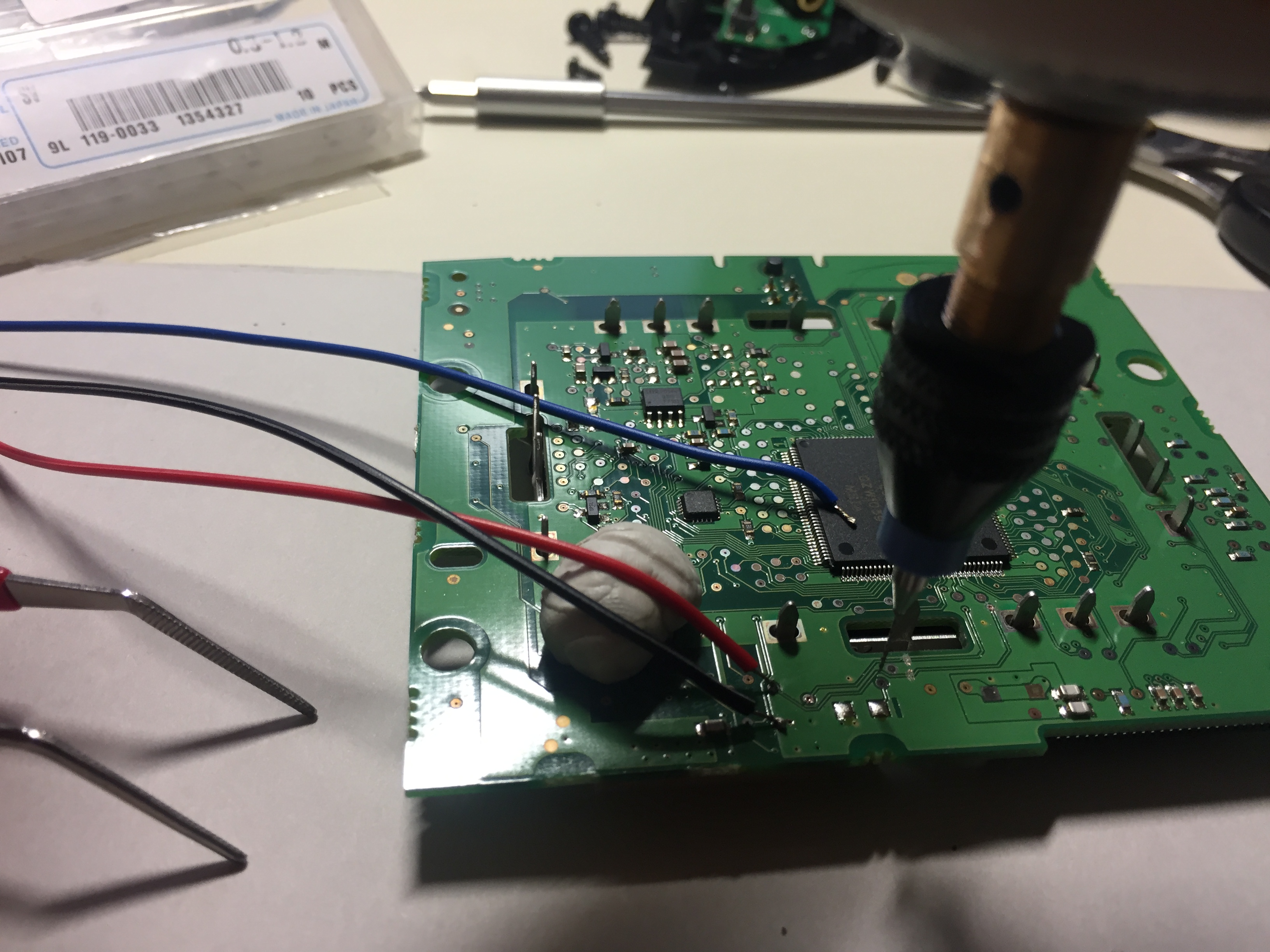
Así que decidí dar por perdida la primera placa e ir directamente a la placa del amplificador, dentro.
Encontré otro post en el que hacían lo mismo, que lo explica muy bien. La idea es nuevamente localizar los pines de audio y «pinchar» ahí. Del encendido nos encargaremos luego.
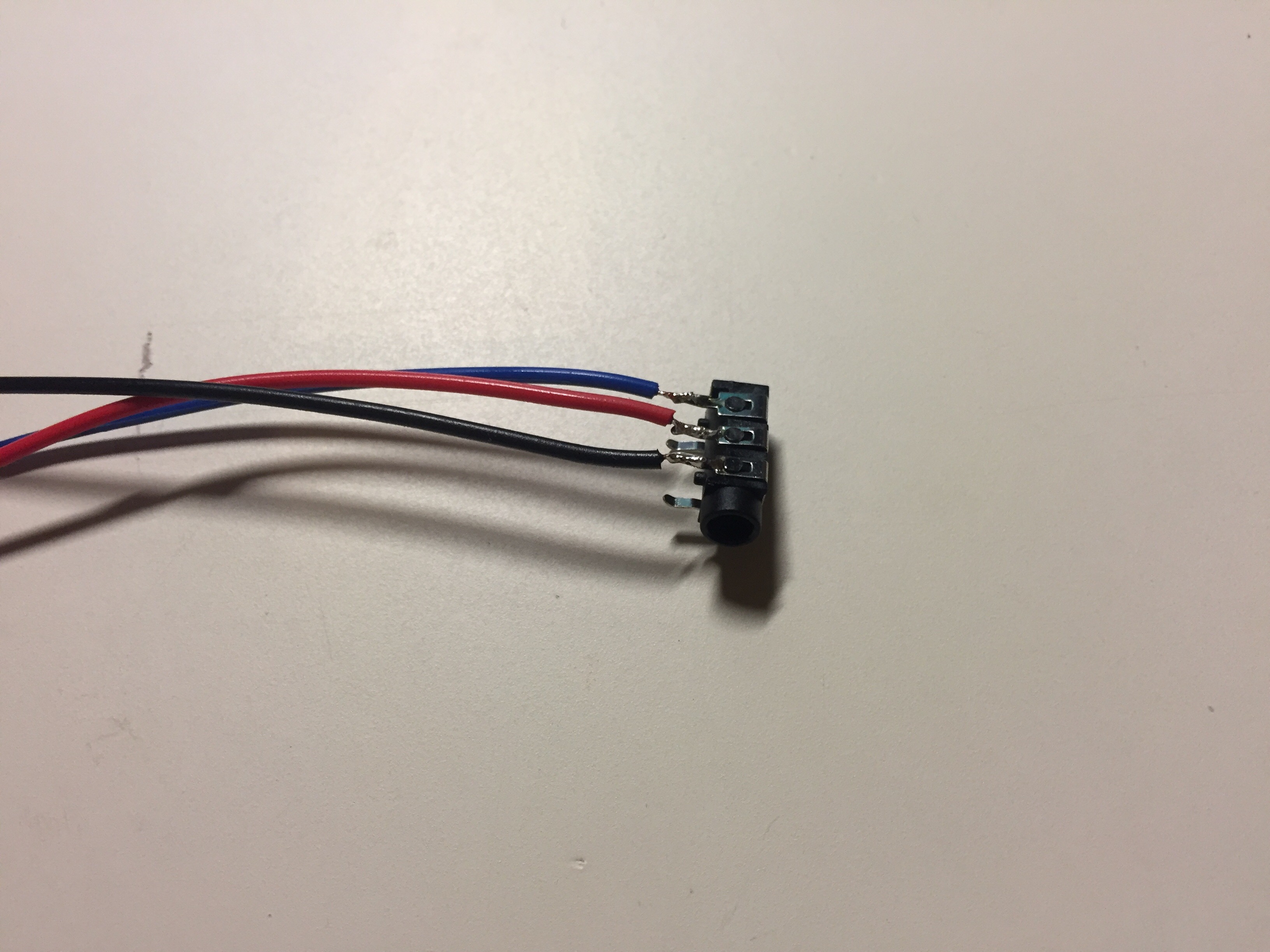
Preparo una clavija hembra de jack de 3.5 mm y le sueldo los cables.
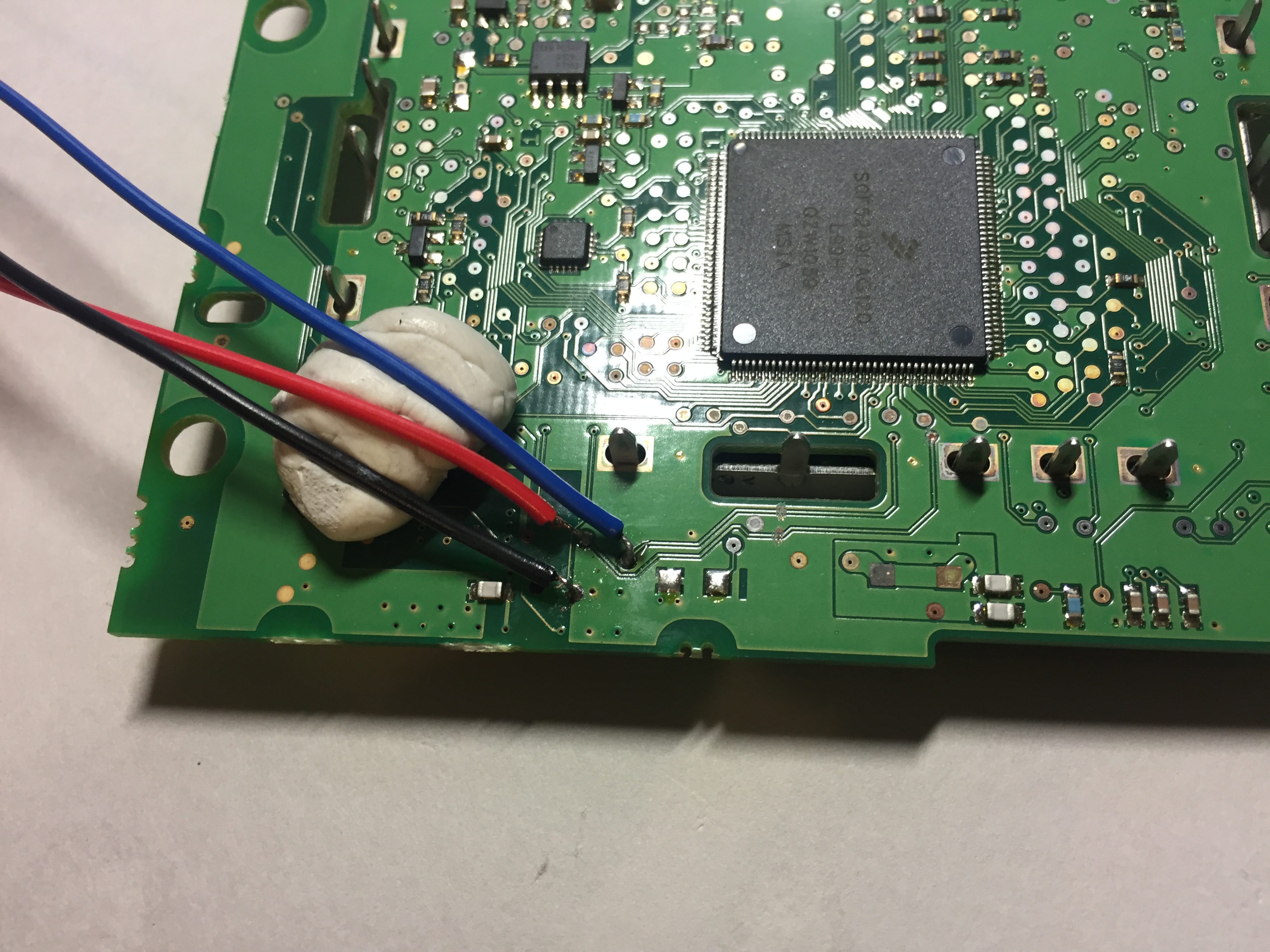
Como estos cables eran algo gruesos, con una pequeña broca agrandé ligeramente los agujeros donde iba a soldar en la placa. Inicialmente soldé por detrás:
Empleo blu-tack para mantener en su sitio los cables mientras sueldo. Siguiendo el mismo criterio de William Paul, realizo unos pequeños cortes al circuito, para que si hay algo más ocurriendo por ahí, no me afecte.
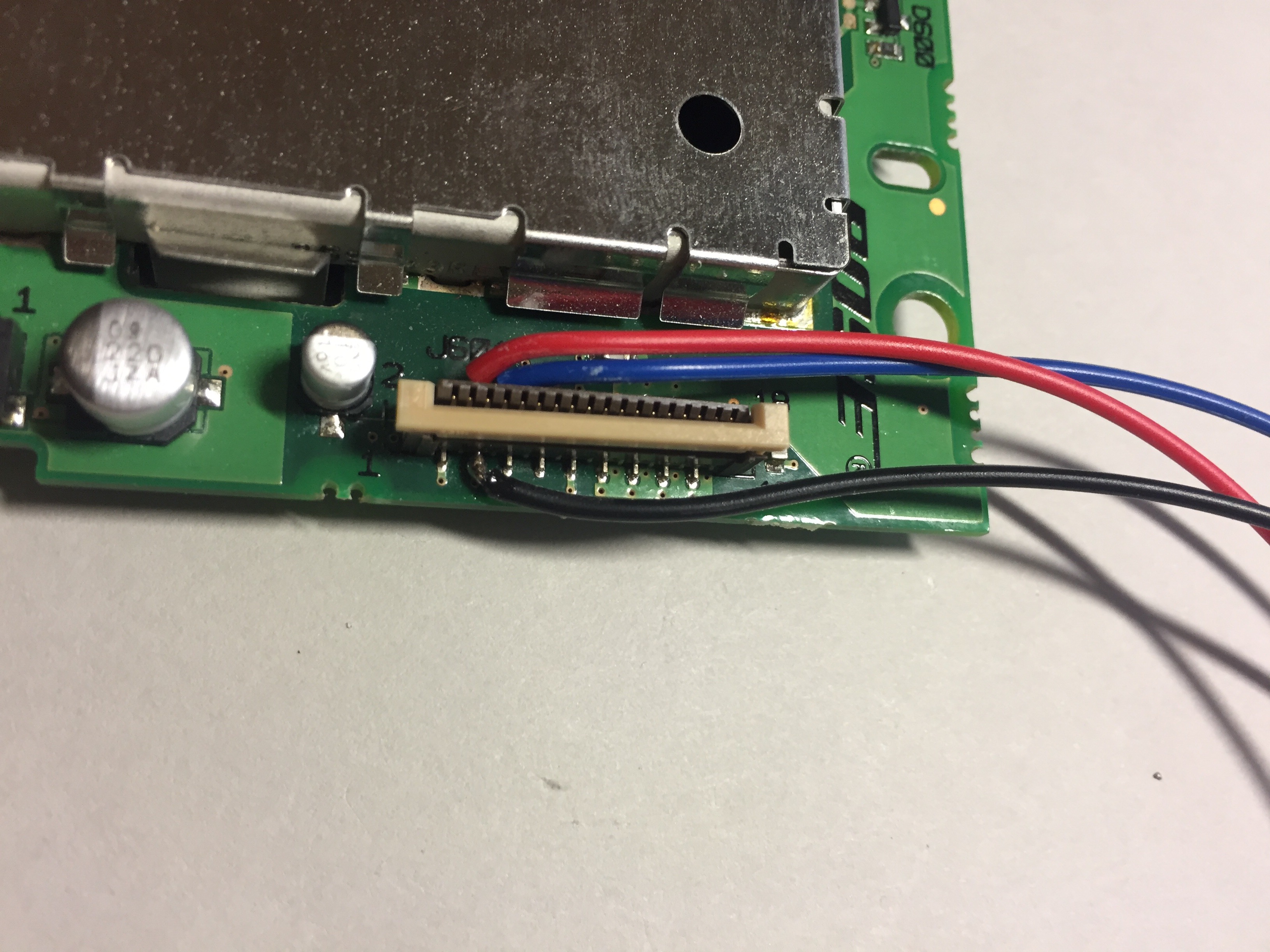
Al final me fue más fácil soldar directamente a las patas de la clavija, por delante:
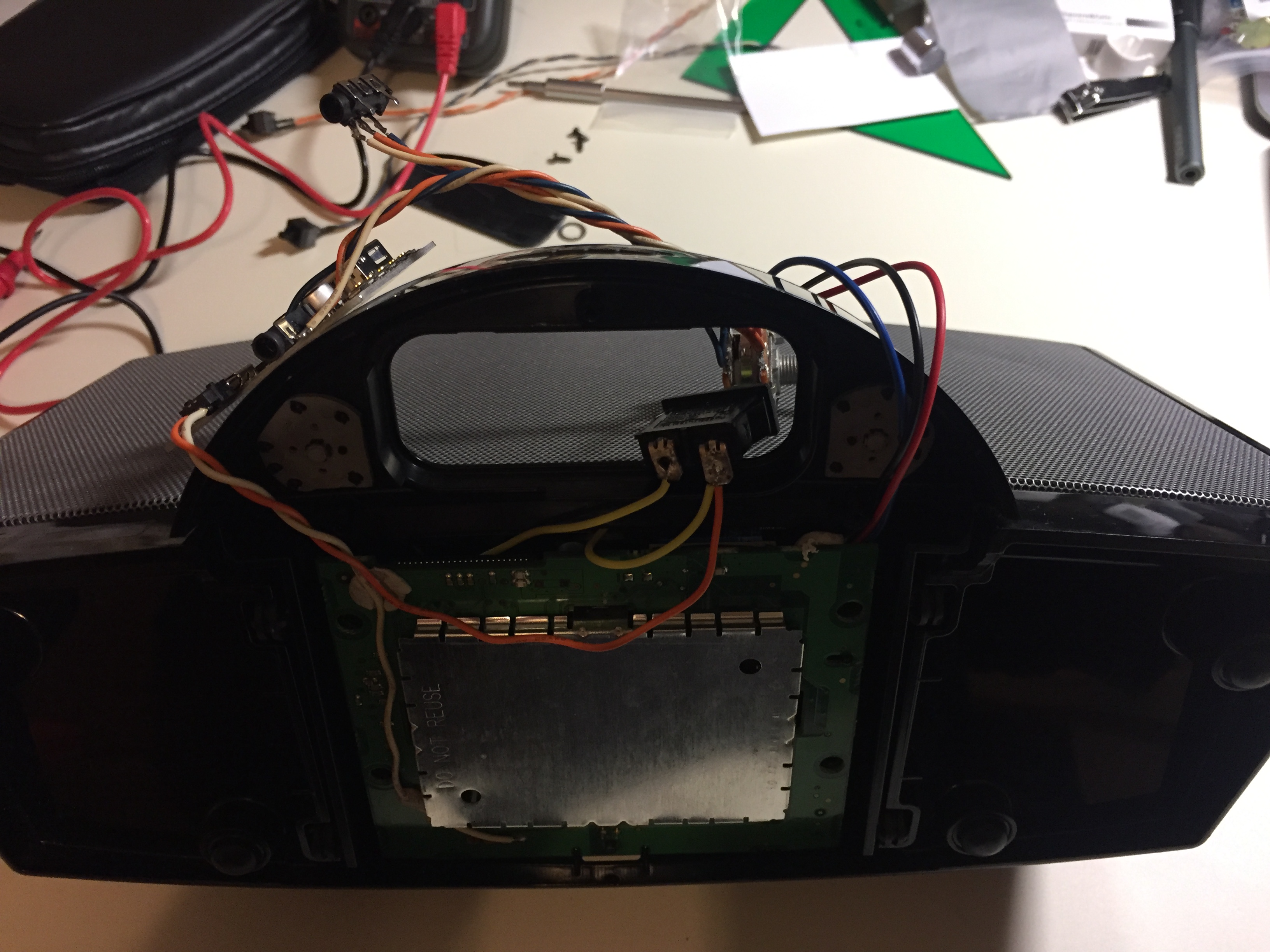
Si probaba el altavoz con estas conexiones, escuchaba música por unos segundo nada más, y luego dejaba de sonar. Así que me quedaba arreglar el «encendido automático». Para eso tenemos que ir un poco más adentro.
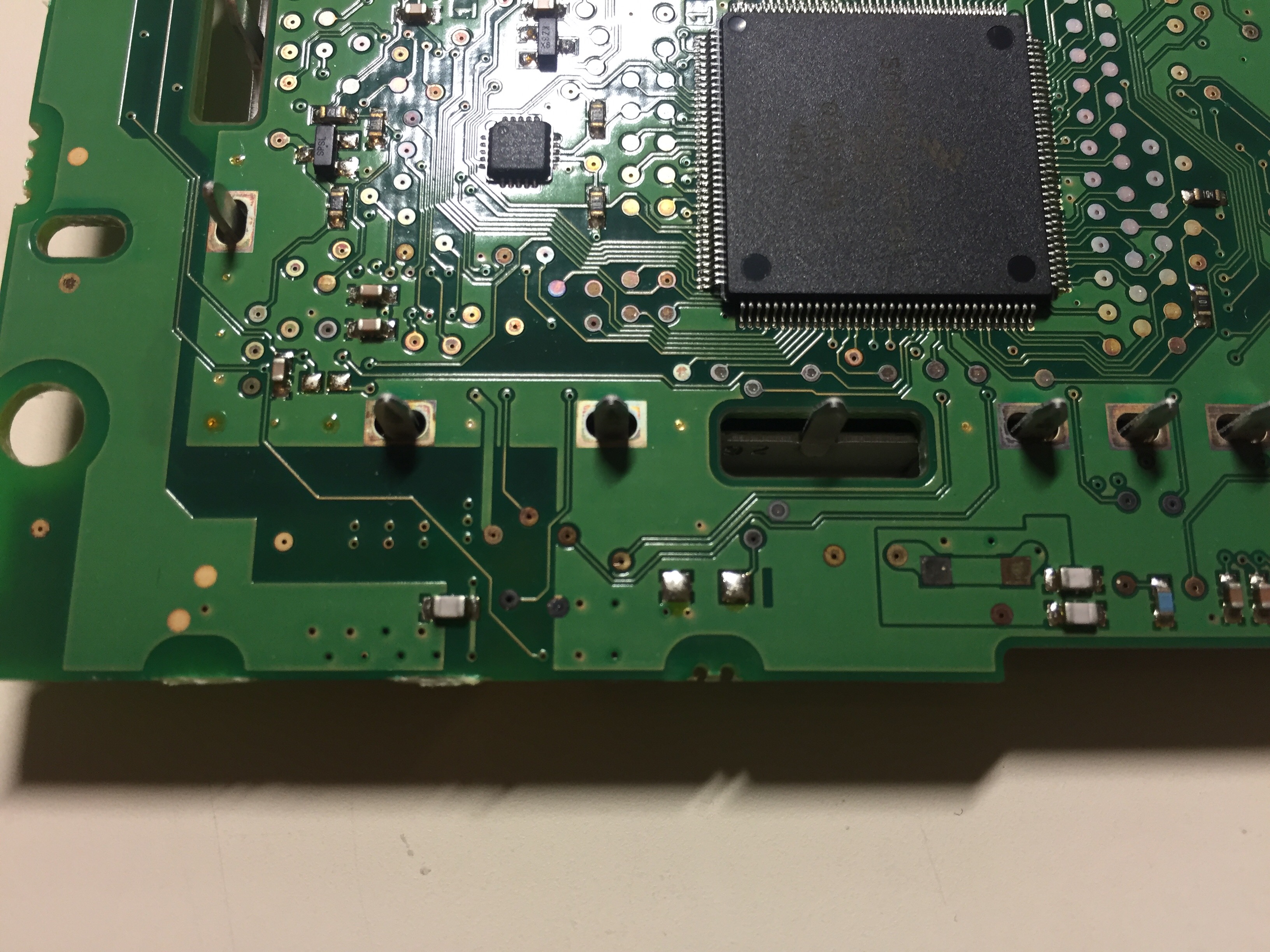
Desmonto la placa del amplificador en sí.
Hay que enviar entre 4.2 V y 5.5 V al pin 6 de este circuito integrado para que se encienda. Paul William lo hizo con un divisor de tensión con dos resistencias, pero es más fácil conectarle directamente un cable que lleve 5 V de la placa anterior, que es lo que hice yo. Soldé con mucho cuidado un cable al pin 6, que luego puse un poco de resina epoxi para que permanezca fijo eternamente.
Soldando ese cable a algún punto que tenga 5 V de la placa anterior (buscar con el multímetro), ¡funcionaba a la perfección!
Ya solo quedaba el volver a ensamblarlo todo en el interior y a hacer un poco de bricolaje para que el acabado fuese perfecto. Esto es lo que más tiempo me llevó…
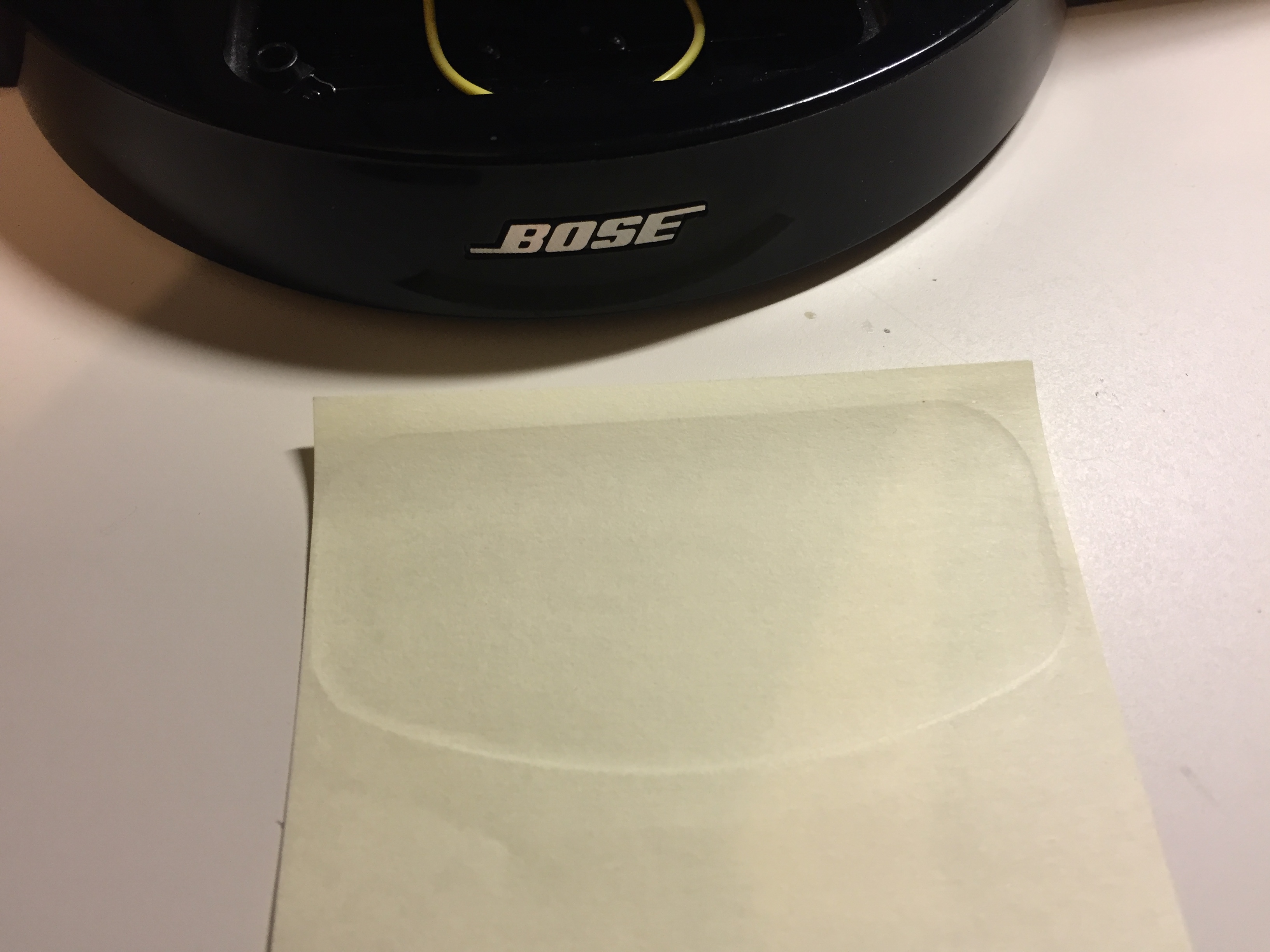
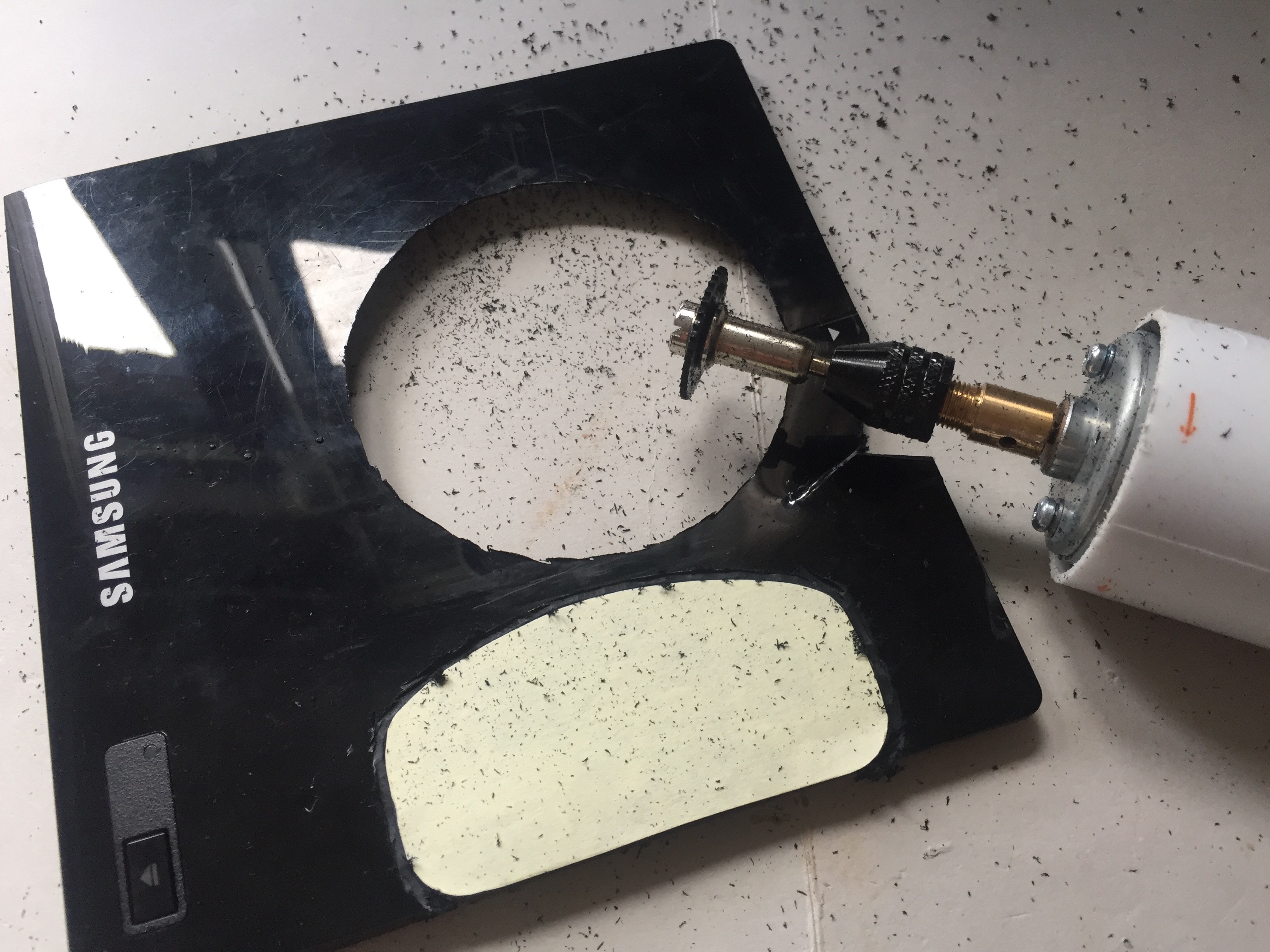
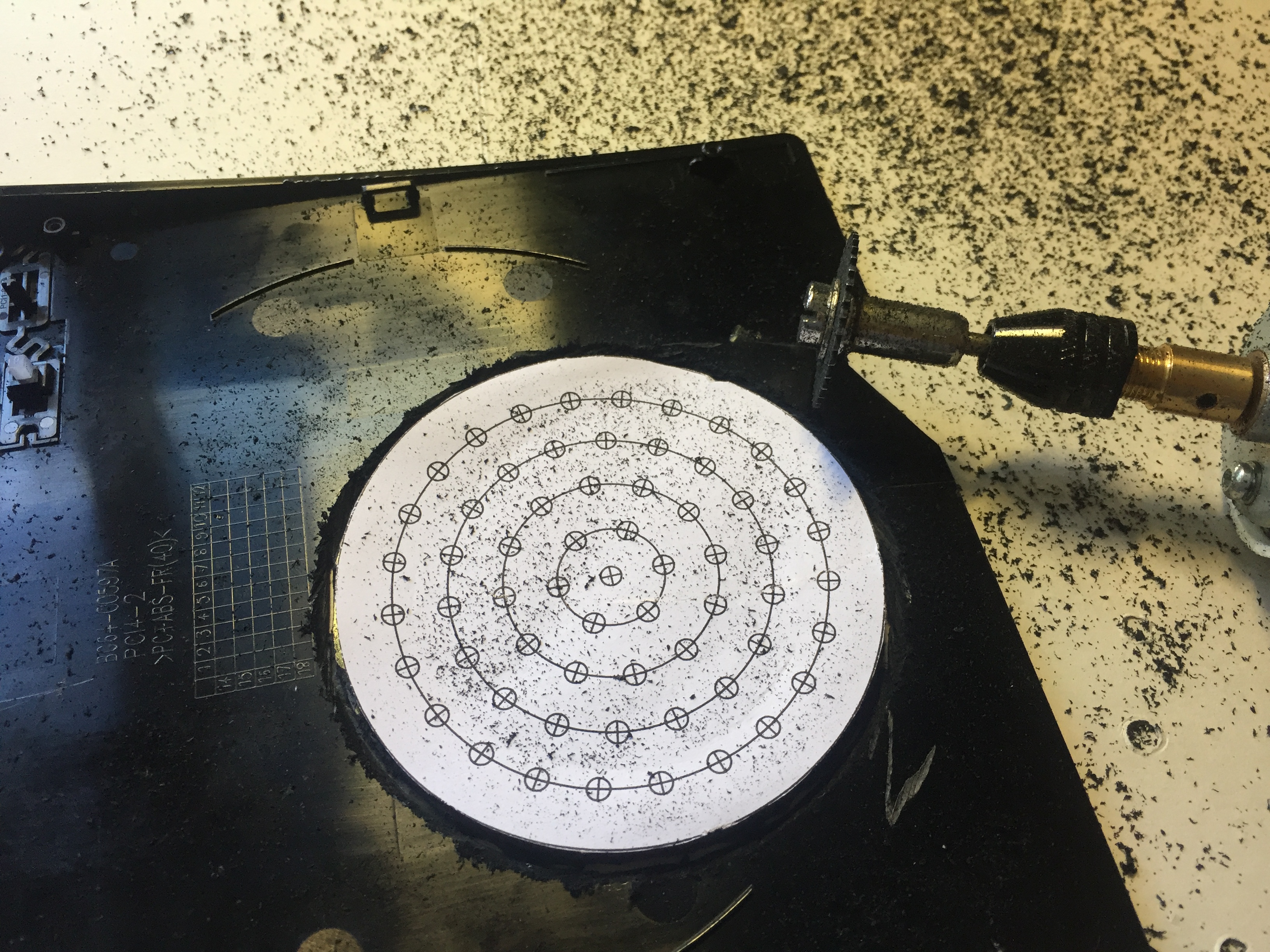
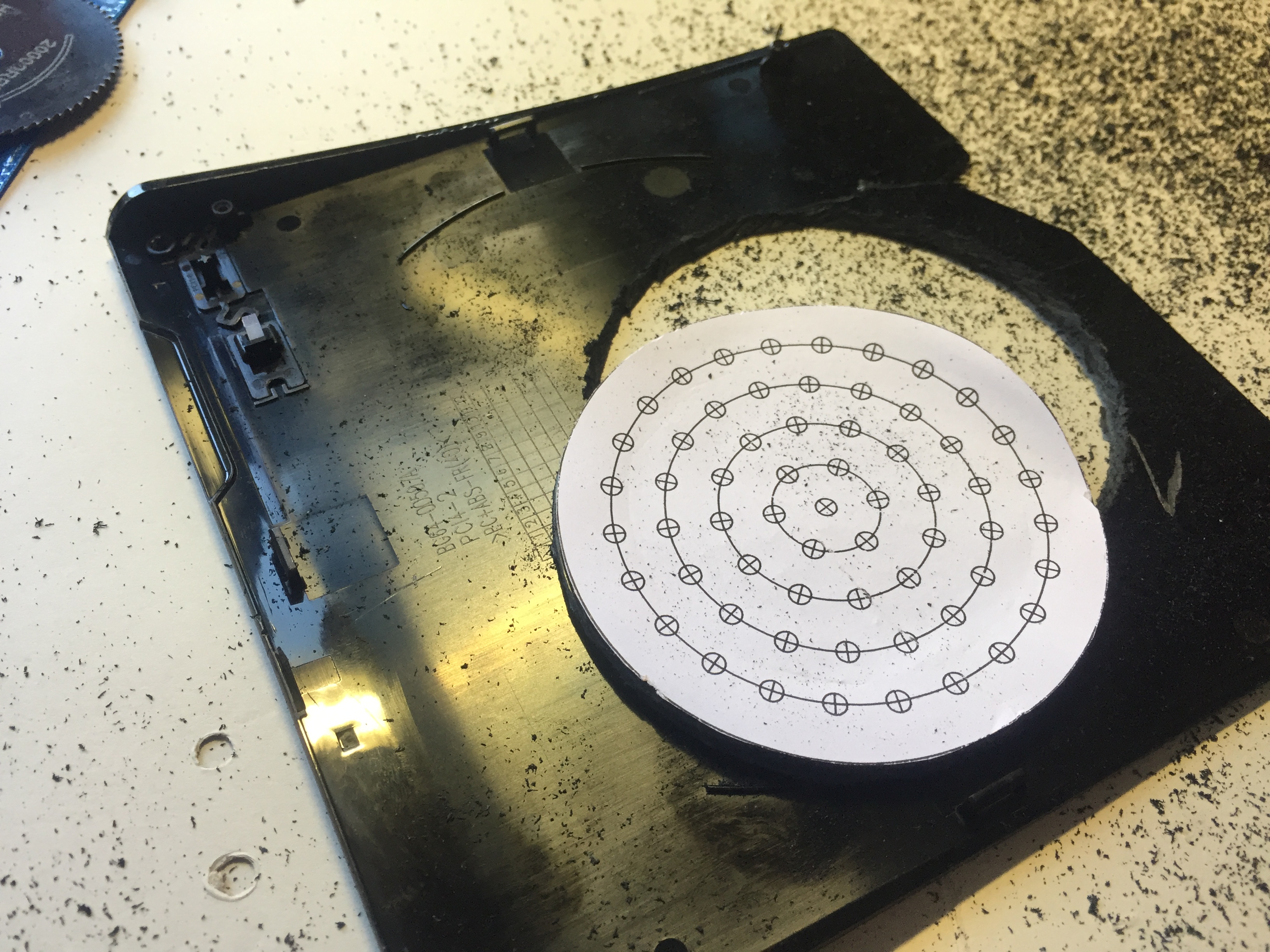
Lo primero era hacer una tapa para el hueco frontal. Hice una planilla marcando el hueco en un papel.
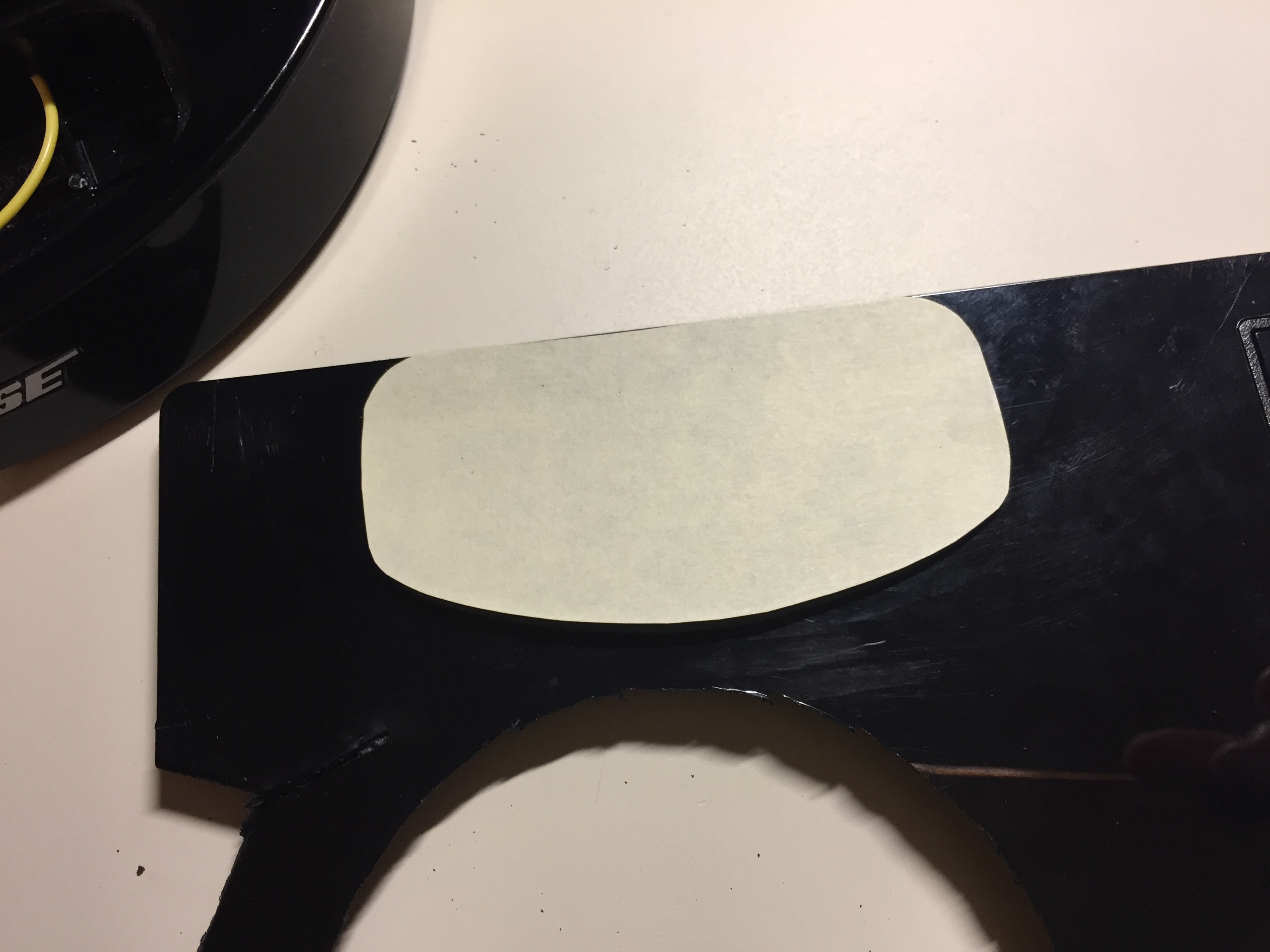
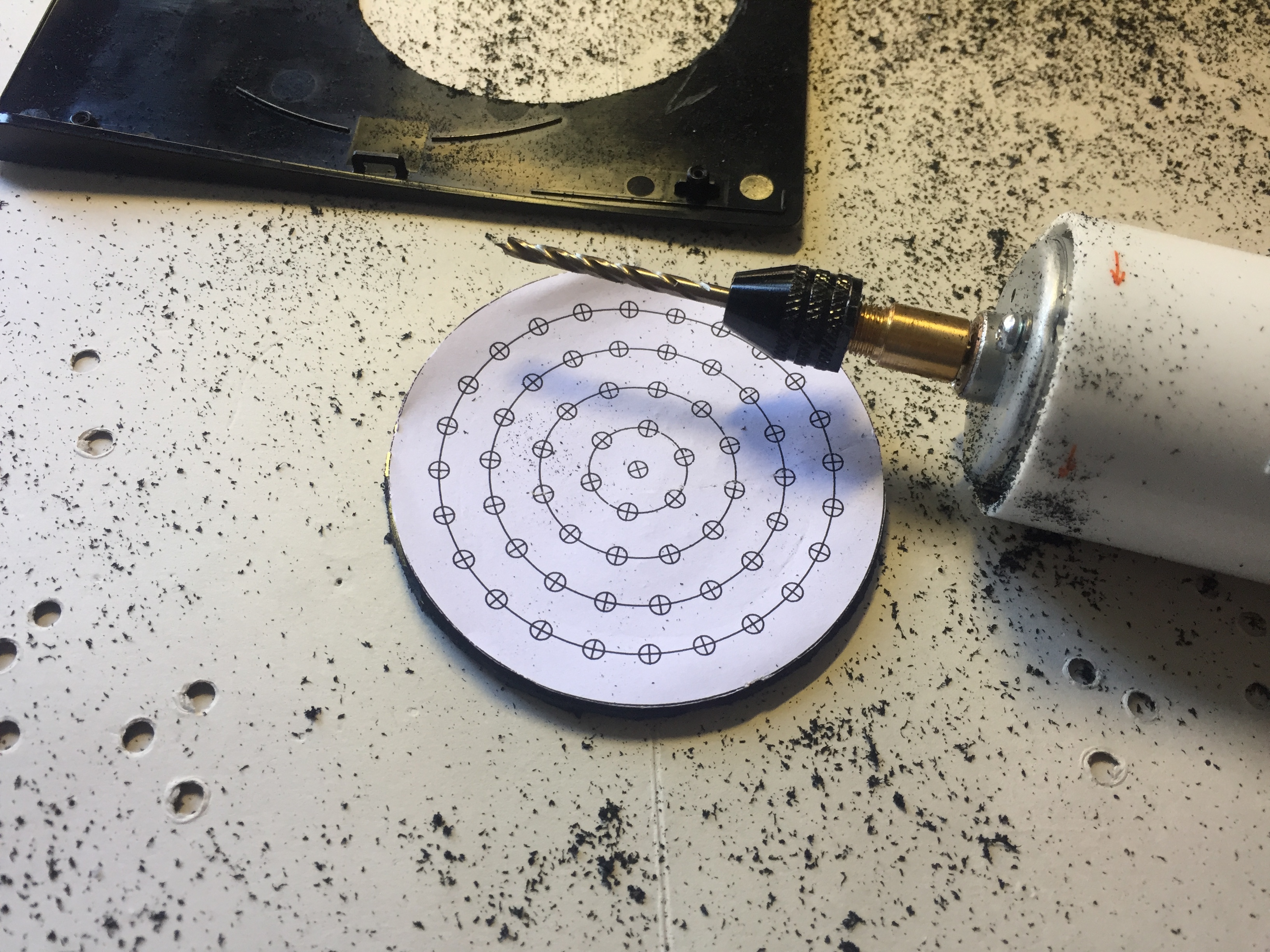
Recorté la planilla y la pegué sobre un trozo de plástico negro de una tapa de un lector externo de DVD (que ya había usado antes en el megáfono de juguete).
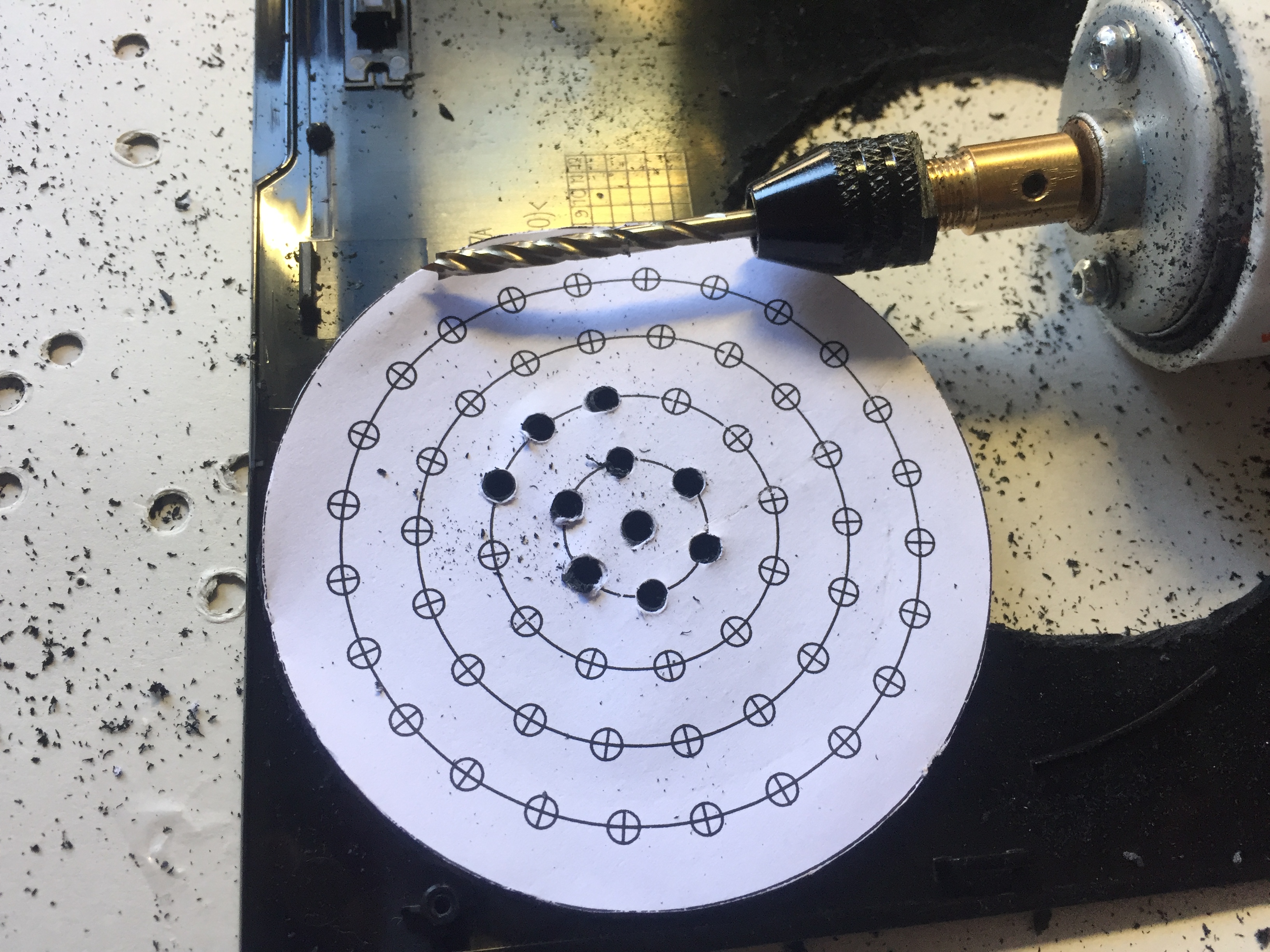
Tras el corte con la mini-Dremel, tuve que lijar mucho hasta que la tapa encajase perfectamente en el hueco. El resultado es perfecto, parece una tapa que viene con el altavoz nuevo…
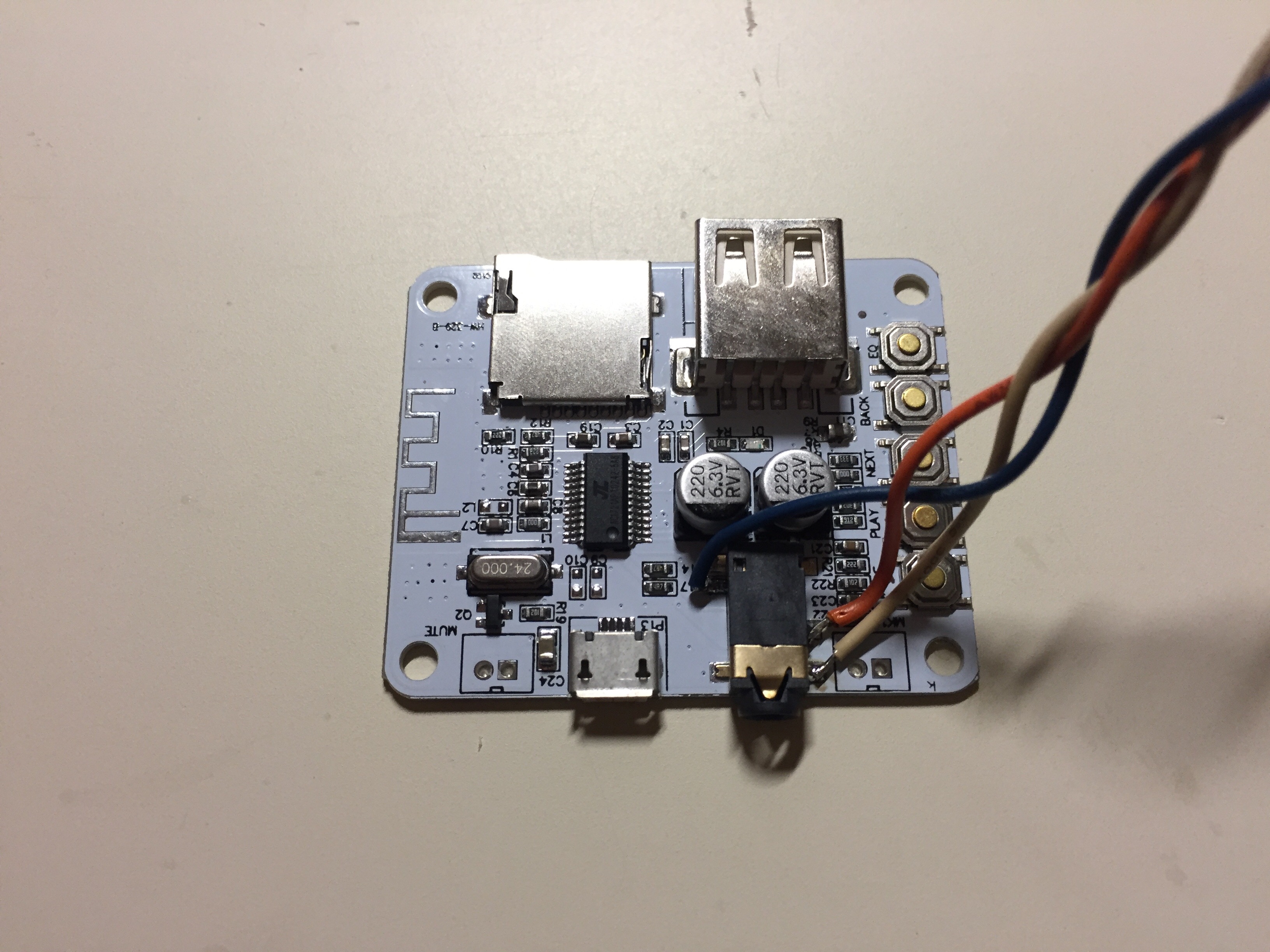
Y ahora, a por el receptor de audio de Bluetooth. Compré este módulo de Bluetooth por 5.52 €. Le sueldo tres cables a las conexiones de audio.
Sueldo dos cables a una clavija de micro-usb, para alimentar el receptor de audio de Bluetooth a través de algún punto con 5V de la placa. Será necesario un aislador de tensión para evitar zumbidos…
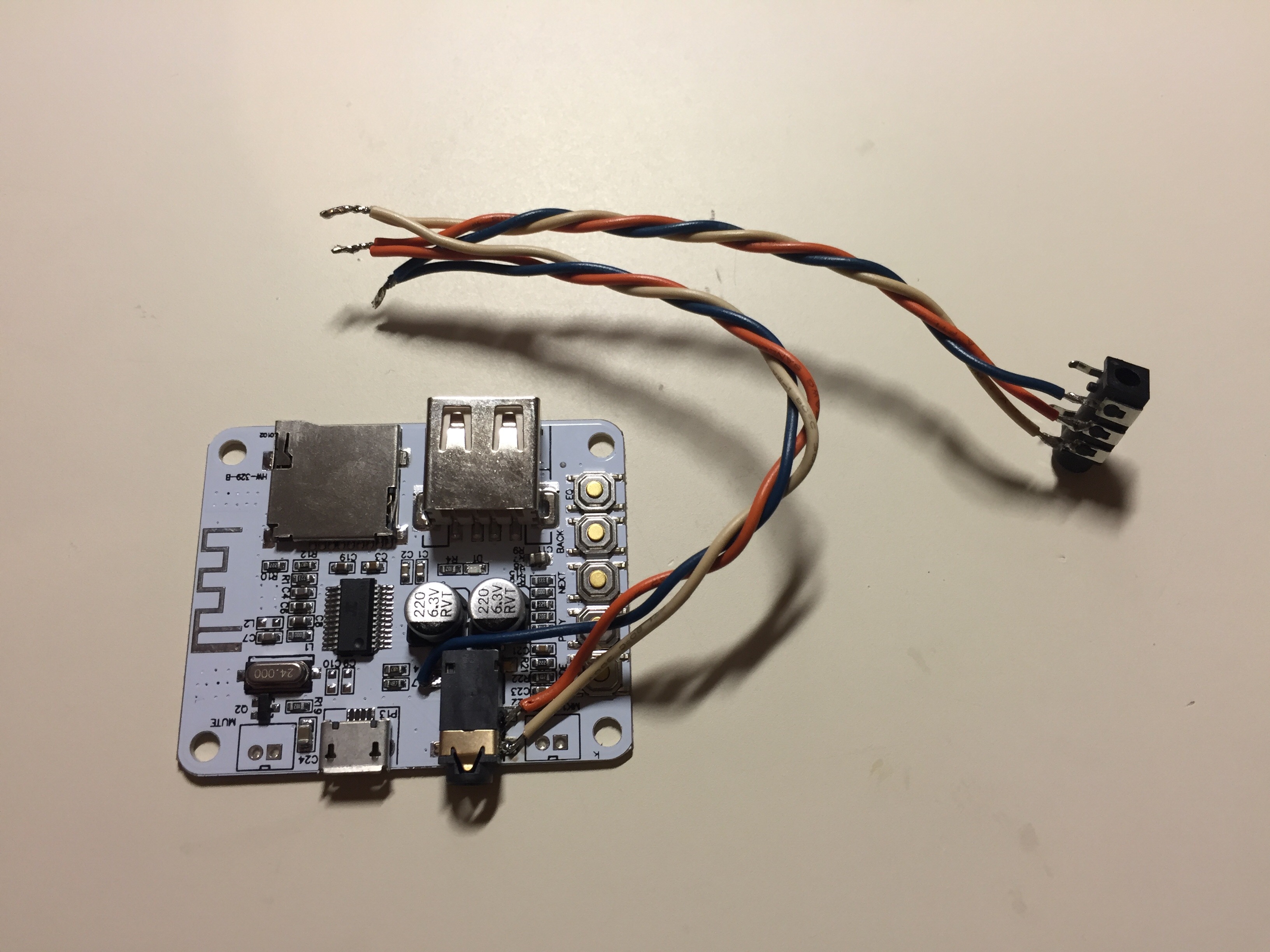
También sueldo tres cables a un conector de audio de 3.5 mm.
Los conecto en paralelo:
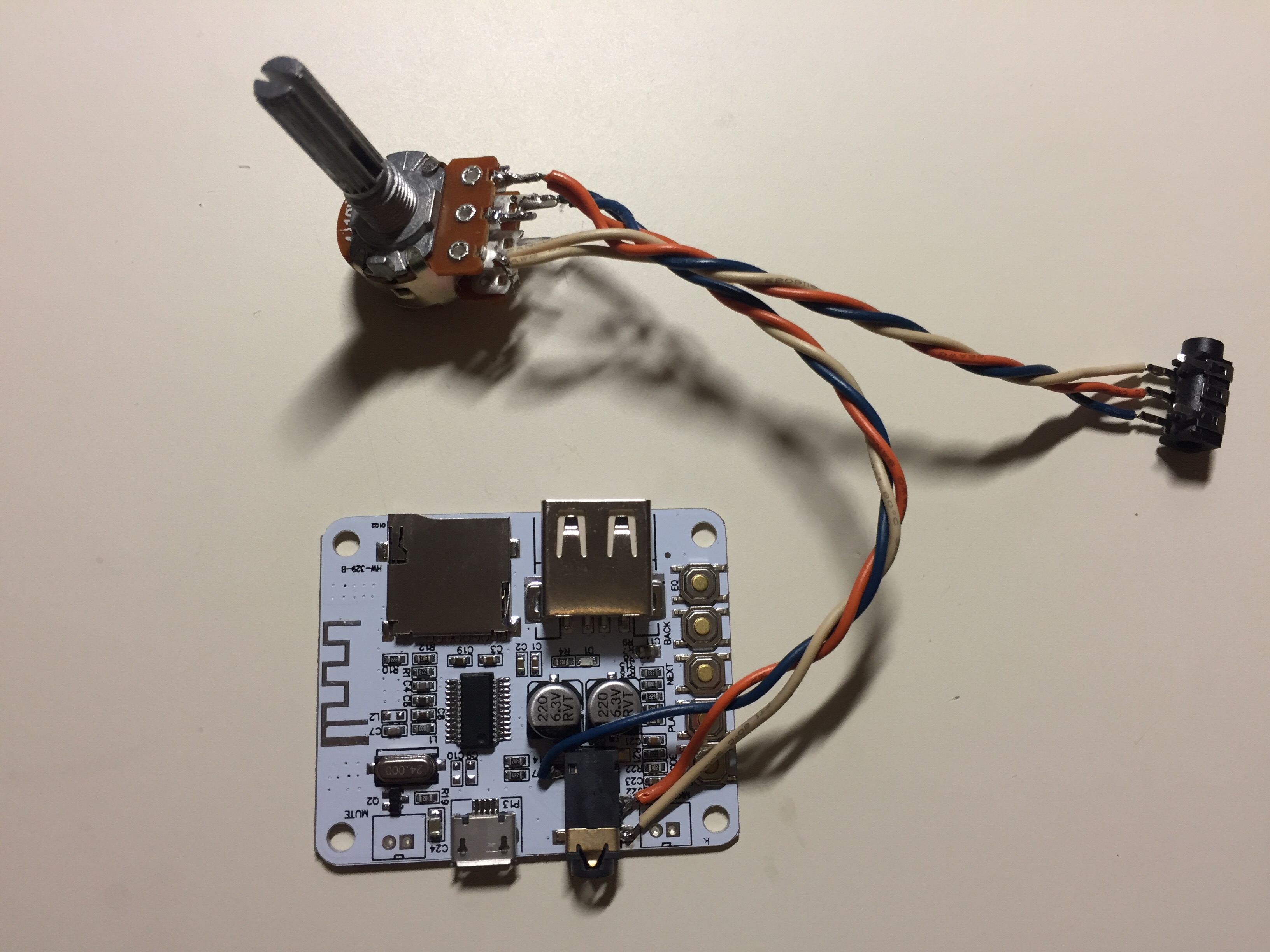
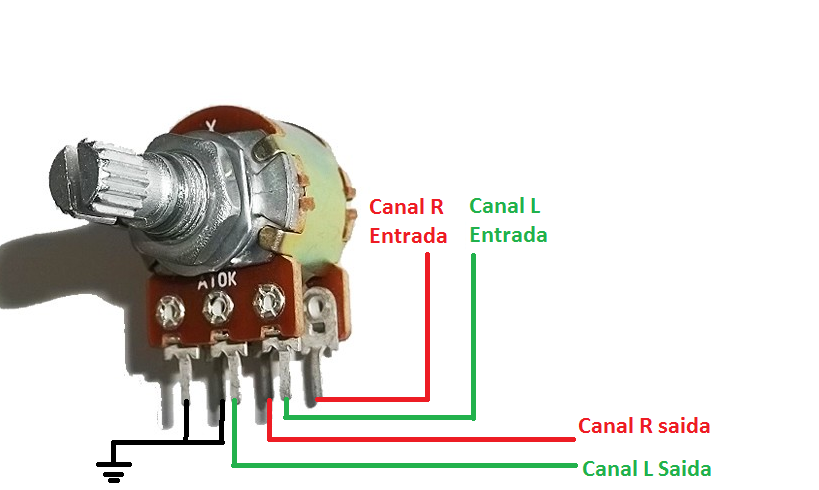
Pero no los conecto directamente a los tres puntos de entrada de audio en la placa, sino que como voy a querer regular el volumen conecto un potenciómetro estéreo logarítimico de 10 KΩ., que me costó 4.4 €.
El potenciómetro lo conecto así:
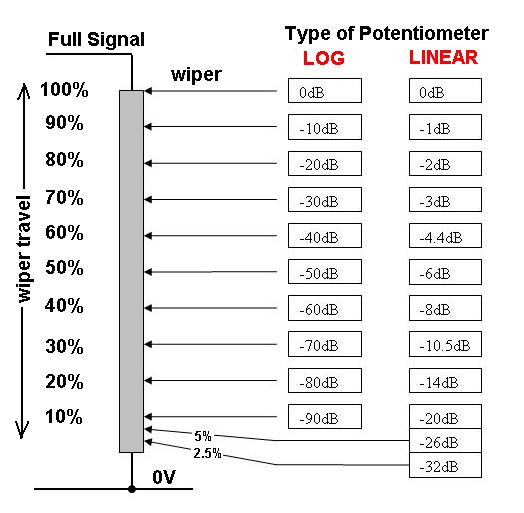
Y es logarítmico porque para audio tiene que ser así; el oido «no funciona linealmente». Esta figura lo explica muy bien:
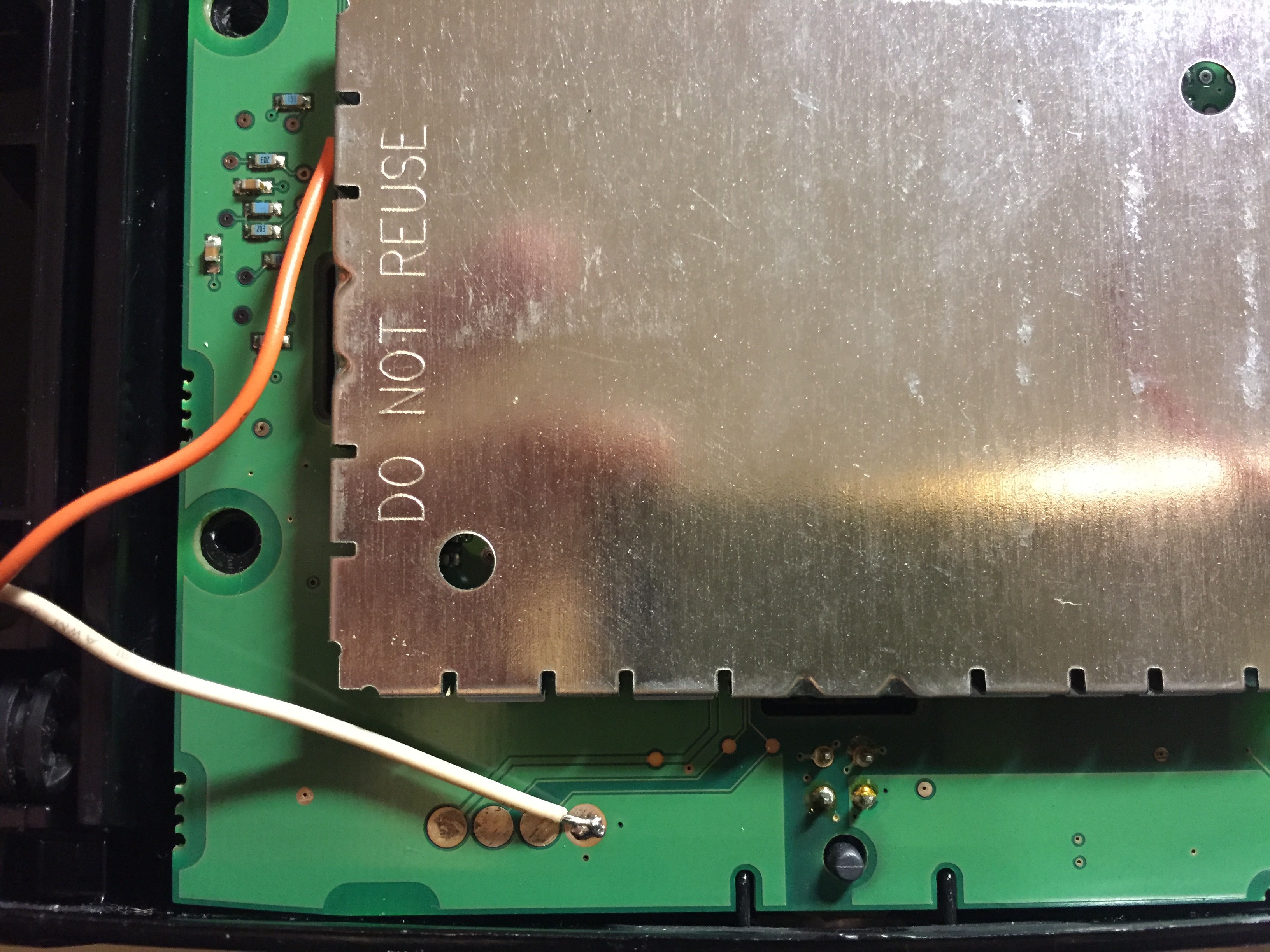
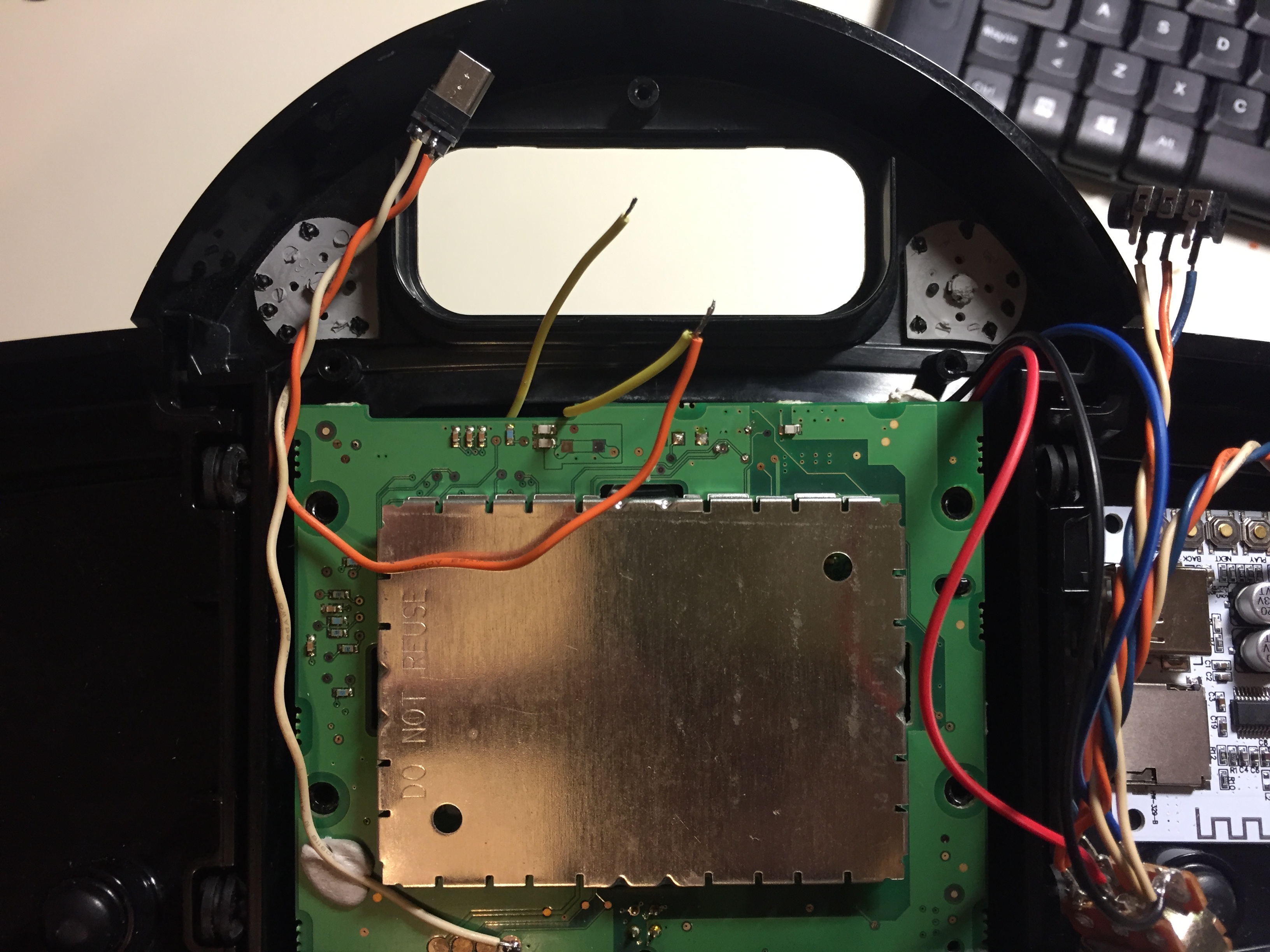
Busco un punto de tierra en la placa y le conecto un cable (blanco):
El otro cable (naranja) inicialmente lo conecté al mismo punto de 5V que empleé para «encender» el altavoz, según se muestra en la siguiente imagen:
Esto sin embargo da un problema de zumbidos muy molestos, lo que hace necesario interponer un aislador de voltaje 5V-5V. Compré un B0505S-1W aquí por menos de 3 €.
Como esto me pasó después de haberlo conectado directamente, tuve que hacer un pequeño apaño posterior, que muestro en unas fotos al final.
Y ahora conecto un interruptor. Voy a sufrir para que me quepa todo dentro de este espacio…
Hago unos taladros en los botones originales de volumen + y – (que ya no tienen uso), que emplearé para el potenciómetro y para la clavija de audio. Fijo con pegamento epoxídico el conector de audio y con pegamento térmico el potenciómetro, que ya lleva su tuerca.
Esto parece el juego «Operación»…
Posteriormente, como daba zumbidos, tuve que añadir el aislador de voltaje, como muestro en las siguientes imágenes:
Antes de cortar los cables blanco y naranja que alimentan al reproductor Bluetooth.
Corto los cables y le sueldo el B0505S-1W:
¡Ya está!
Recorto un poco el fuste y le coloco el embellecedor al potenciómetro, y ya está terminado.
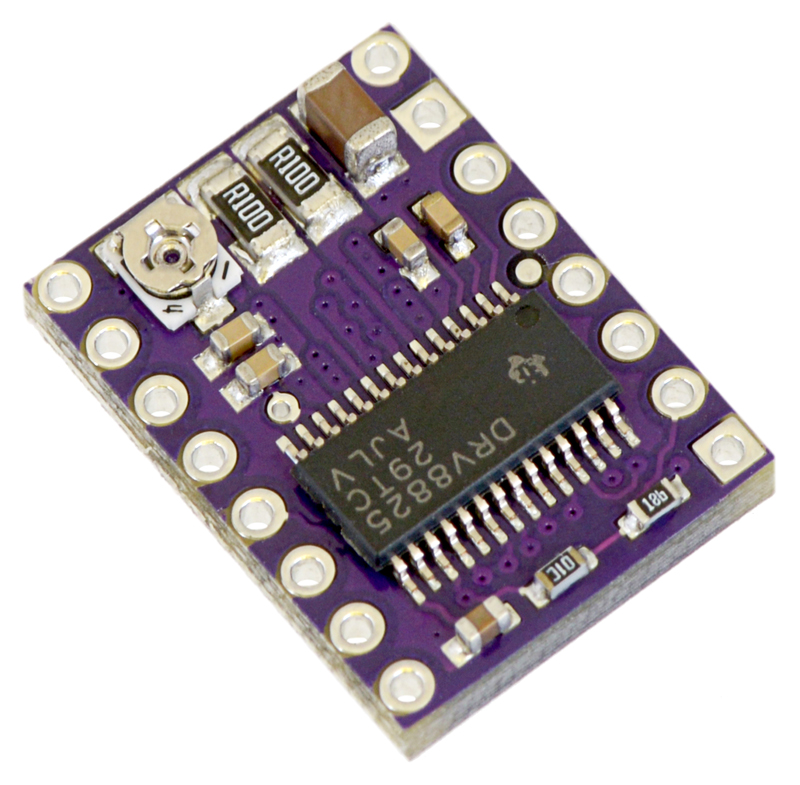
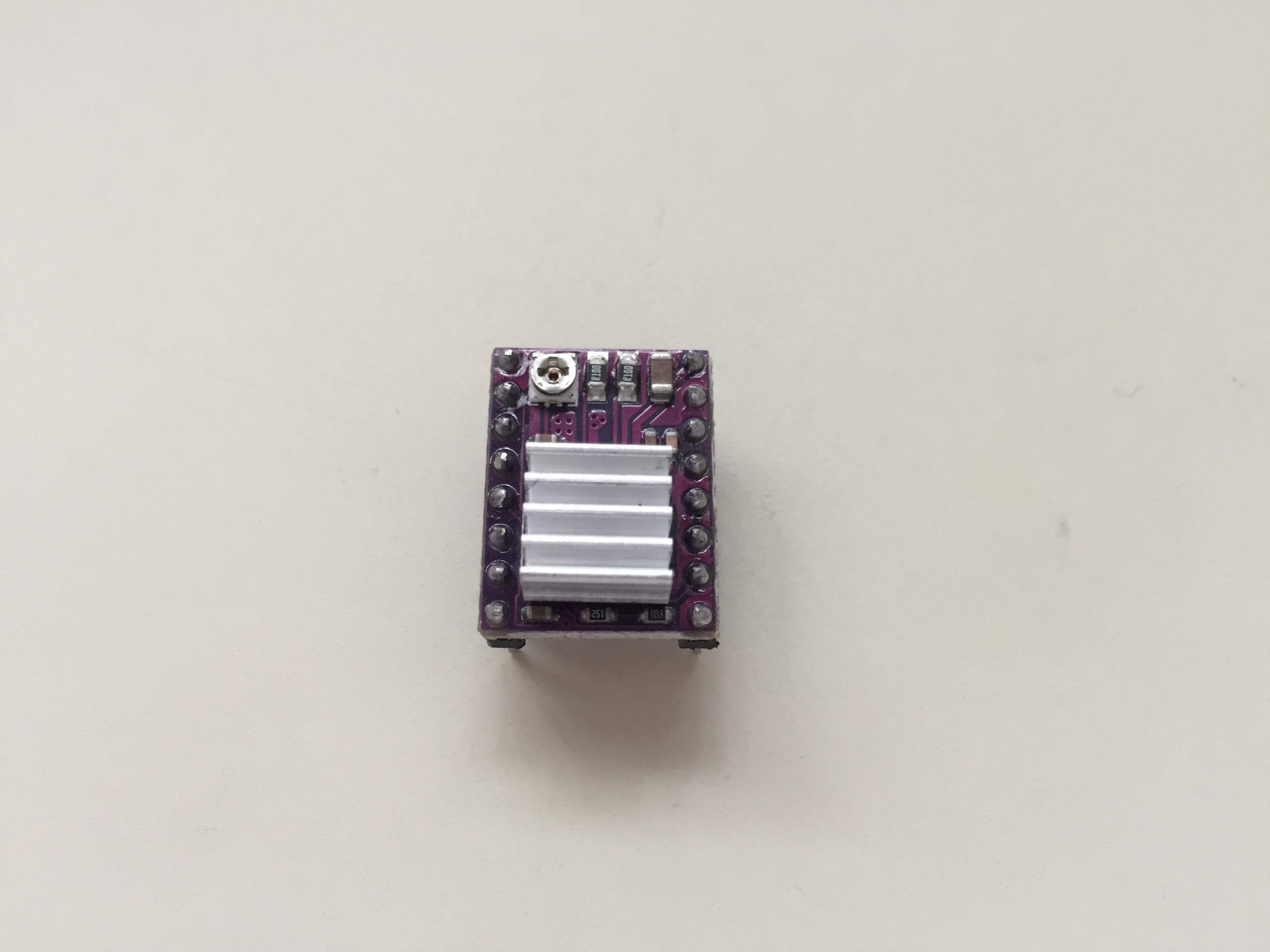
Para un proyecto que tengo entre manos (un scanner 3D por fotogrametría, ver esta entrada), quiero controlar un motor a pasos (stepper) con una Raspberry Pi. En esta entrada ya expliqué cómo hacerlo con Arduino, pero ahora lo voy a hacer con la Rapsberry Pi, y voy a emplear un driver DRV8825.
En teoría, al no ser linux un sistema de «tiempo real», no es muy indicado para manejar directamente elementos que requieren un control preciso del tiempo. Para mis propósitos, como no necesito controlar de forma muy precisa la velocidad, sino la posición, me sirve sin problemas.
Características principales del driver DRV8825:
Para motores bipolares
Permite microstepping de hasta 1/32
1.5 por fase o 2.2A si se dispone de ventilación forzada de aire o disipadores
Interfaz casi idéntica al A4988
45 V máximo
Control de corriente máxima con un potenciómetro
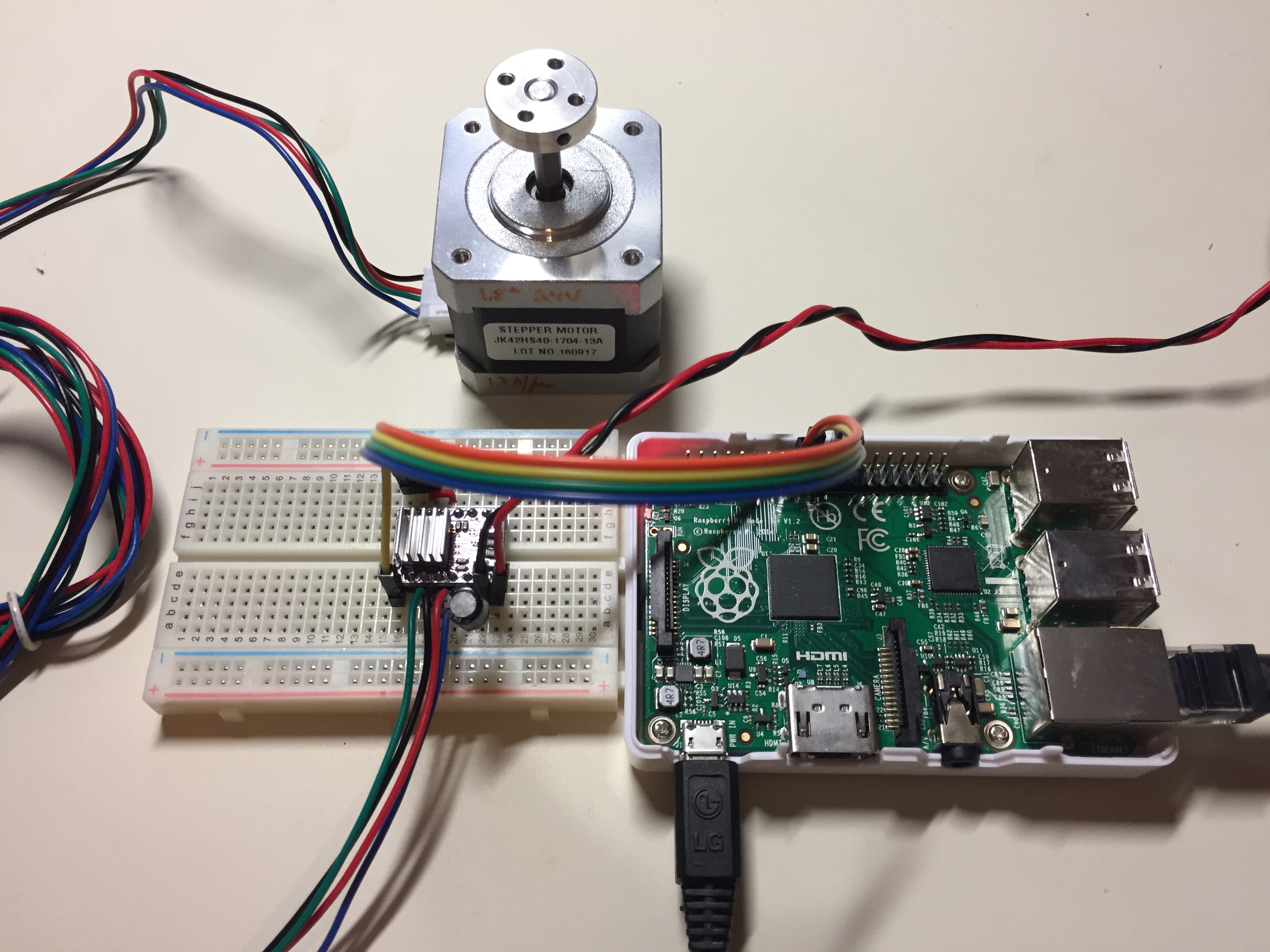
El motor que tengo es un motor NEMA 17 JK42HS40-1704 13A, comprado aquí por 12.50 €.
Características:
Número de parte: JK42HS40-1704 13A
Tamaño de marco: NEMA17
Ángulo del paso: 1,8 grados
Voltaje: 3.4V
Corriente: 1,7 A/phase
Resistencia: 2,0 ohmios/fase
Inductancia: 3,0 mH/phase
Llevar a cabo el esfuerzo de torsión: 4000g-cm 58.30 OZ-IN
Inercia del rotor: 54 g-cm2
Esfuerzo de torsión de la muesca: 0,22 kilogramo-cm
Número de ventajas de alambre: 4
Peso: 0,24 kilogramos
Longitud: 40m m
Eje del motor: 5mm
Longitud del árbol delantero: 20 mm
Certificación: CE, ROHS, ISO9001
Para alimentar el motor empleo una fuente de alimentación de un ordenador (ver esta entrada).
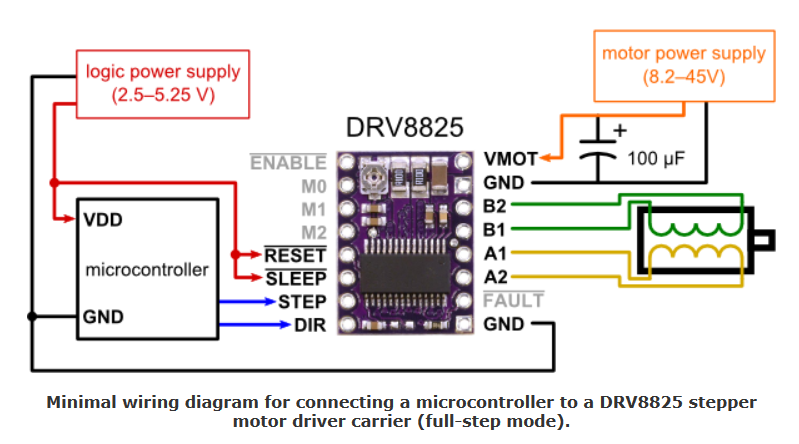
Siguiendo las instrucciones de la página de Pololu, voy a emplear el siguiente modo de conexión, con paso completo (sin microstepping):
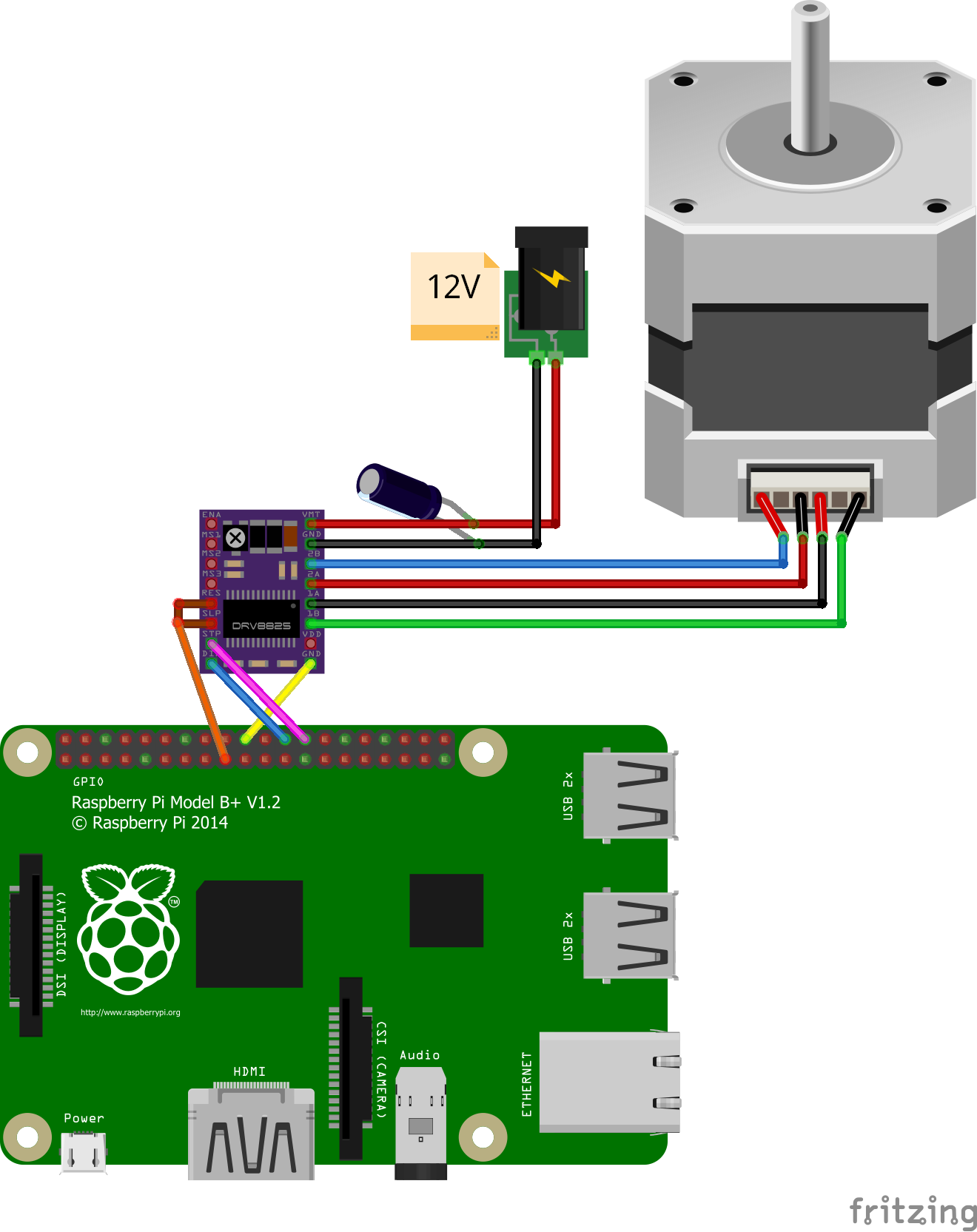
El esquema Fritzing sería así:
Manejar un motor paso a paso con DRV8825 y Raspberry Pi
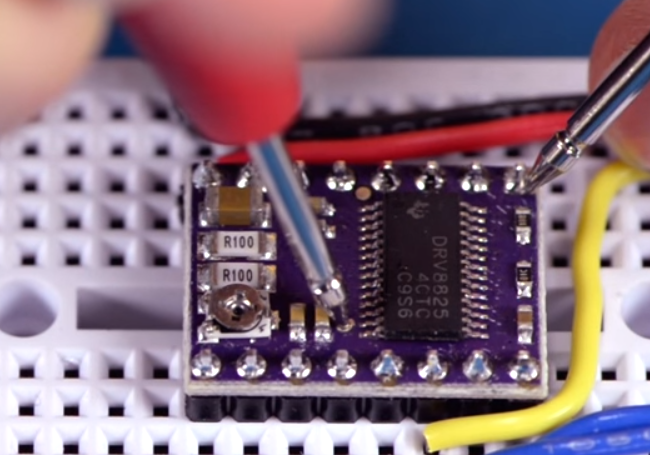
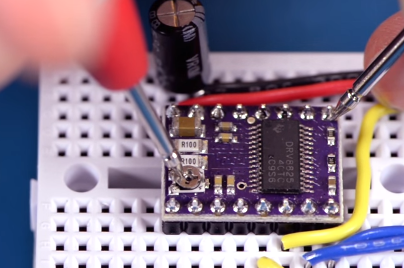
La conexión de los cables del motor al DRV8825 la hago así:
B2: azul
B1: rojo
A1: negro
A2: verde
Para no dañar el motor tenemos que regular inicialmente el potenciómetro a la mínima potencia, girando el potenciómetro en sentido antihorario hasta el final, y más adelante ajustarlo hasta la capacidad del motor. En este vídeo se explica cómo regular adecuadamente la intensidad.
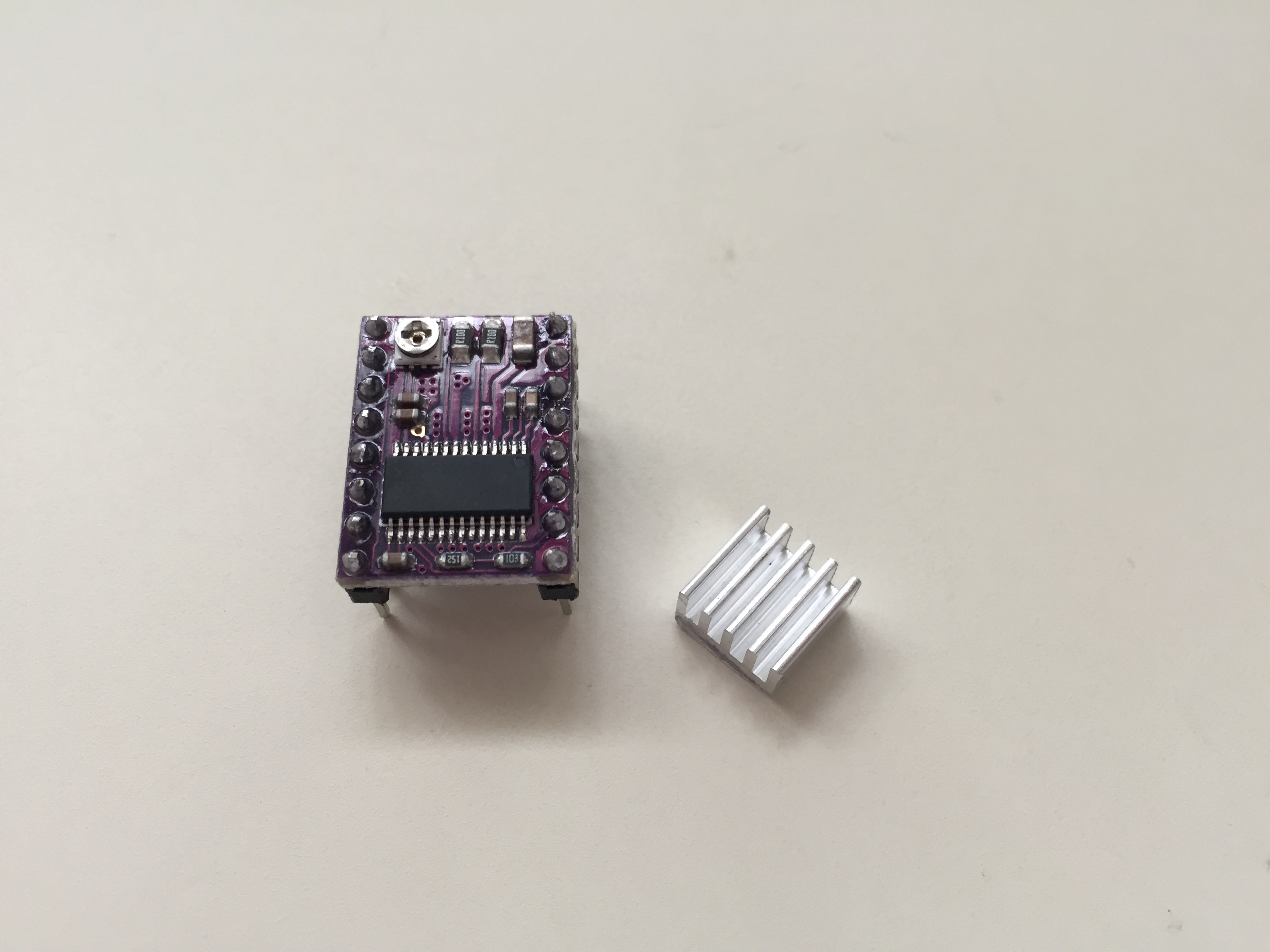
Empiezo con el motor desconectado. Lo primero, calculo el voltaje por cada fase. Para eso me fijo en las características de mi motor. Ahí me dicen que el motor es de 1.7 A / fase. Tendré que limitar el DRV8825 a este valor. Por encima de 1.5 A (y hasta 2.2A) el controlador DRV8825 debe tener ventilación forzada de aire o un disipador, así que le pego un disipador (me venía al comprarlo con el DRV8825), pues pretendo fijarlo en la capacidad máxima del motor.
Ahora tengo que ajustar la corriente del DRV8825 con el potenciómetro. Primero tengo que averiguar a cuánto he de limitar esa corriente. Para ello empleo la fórmula que viene en la hoja de especificaciones del driver:
Current Limit = VREF × 2
(Ojo, que por muchas páginas se ven otras fórmulas; hay que emplear la fórmula específica de nuestro driver).
Entonces:
1.7 = VREF x 2
VREF = 0.85 V
Pero ojo, este voltaje va asociado a la corriente máxima que recibirá el motor, y depende de la configuración de micropasos. Hay que consultar en la Tabla 2 de la hoja de especificaciones del DRV8825. En mi caso, con paso completo (full step), la corriente es un 71%, así que deberé multiplicar por este factor el resultado anterior:
VREF = 0.71 · 0.85 = 0.60 V
Así que el voltaje límite que debo ajustar es 0.60 V por fase.
Ahora tengo que ver dónde medir con el multímetro en el DRV8825:
Aunque es más fácil medir directamente desde el potenciómetro:
Desconecto el motor, pero alimento con 12V el DRV8825 y alimento también el Arduino a través del puerto USB. Con todo así, mido el voltaje y ajusto el potenciómetro hasta alcanzar mis VREF calculado antes (0.60 V).
Ya tengo el driver ajustado a mi motor, así que ya puedo conectarlo y empezar a utilizarlo.
En la Raspberry Pi voy a emplear código en Python. He conectado el pin de STEP del DRV8825 en el pin GPIO7 de la Raspberry Pi (pin 26), y el de DIR en el pin GPIO8 (pin 26). Mandando señales a estos pines podré indicar que se avance un paso (pin STEP), y cambio de dirección en en pin DIR. Por como tengo conectado todo, son pasos completos, nada de micropasos, que no me hacen falta por el momento.
Con el código siguiente en Python el motor da una vuelta completa en una dirección, y luego cambia de dirección y da otra vuelta:
# -*- coding: utf-8 -*-
import time #Para las pausas
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD) #Usar la numeración de pines de la placa
pinDir = 24 #Pin DIR
pinStep = 26 #Pin Step
numSteps = 200 #Número de pasos del motor
microPausa = 0.005 #Número de segundos de pausa
GPIO.setup(pinDir,GPIO.OUT)
GPIO.setup(pinStep,GPIO.OUT)
while True:
GPIO.output(pinDir,0) #Establezco una dirección (0 o 1)
for x in range(0,numSteps):
GPIO.output(pinStep, True)
time.sleep(microPausa)
GPIO.output(pinStep, False)
time.sleep(microPausa)
time.sleep(microPausa)
GPIO.output(pinDir, 1) #Cambio de dirección
for x in range(0,numSteps):
GPIO.output(pinStep, True)
time.sleep(microPausa)
GPIO.output(pinStep, False)
time.sleep(microPausa)
GPIO.cleanup() #Para acabar correctamente
Y aquí un vídeo mostrando el motor en funcionamiento:
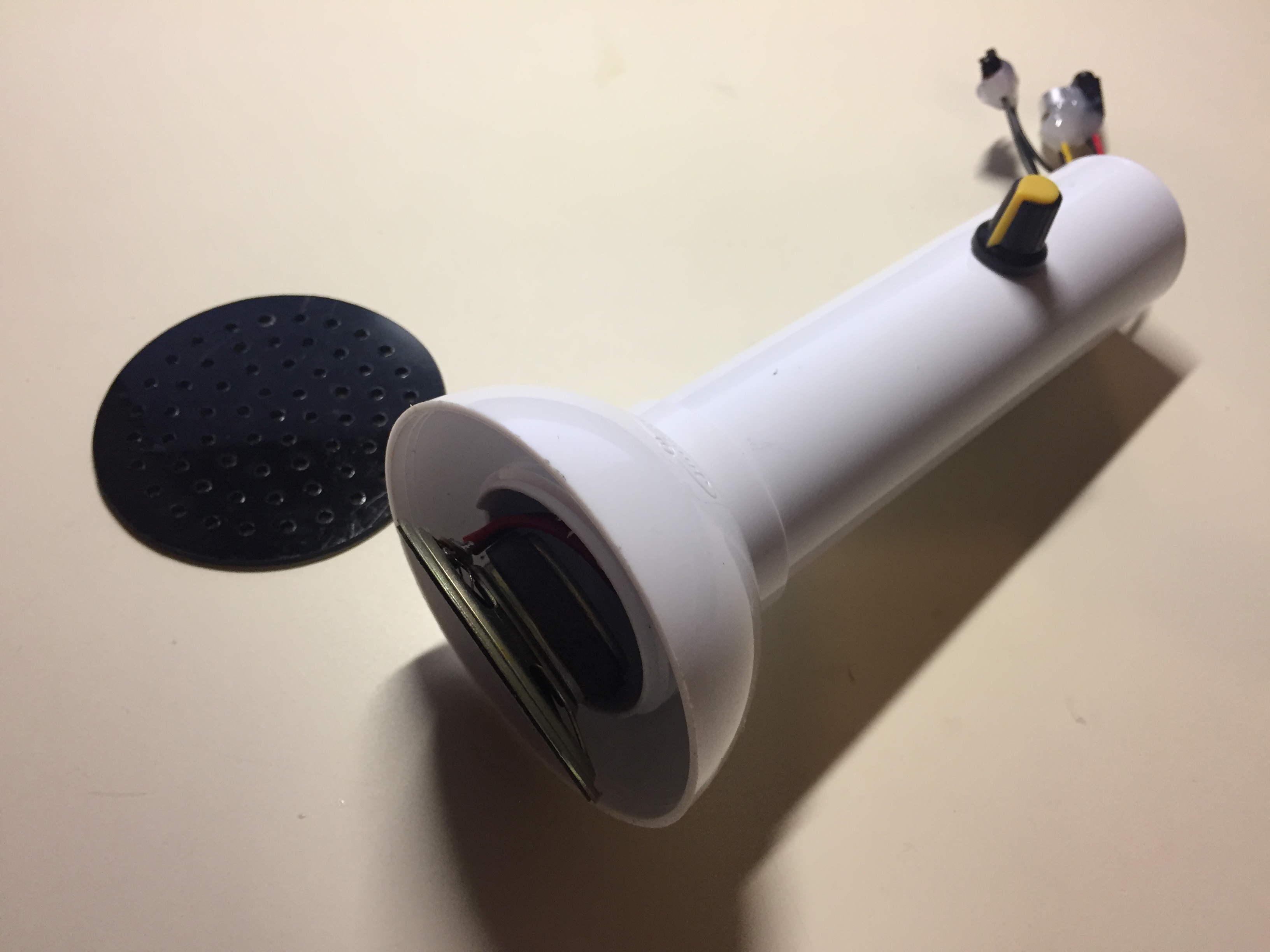
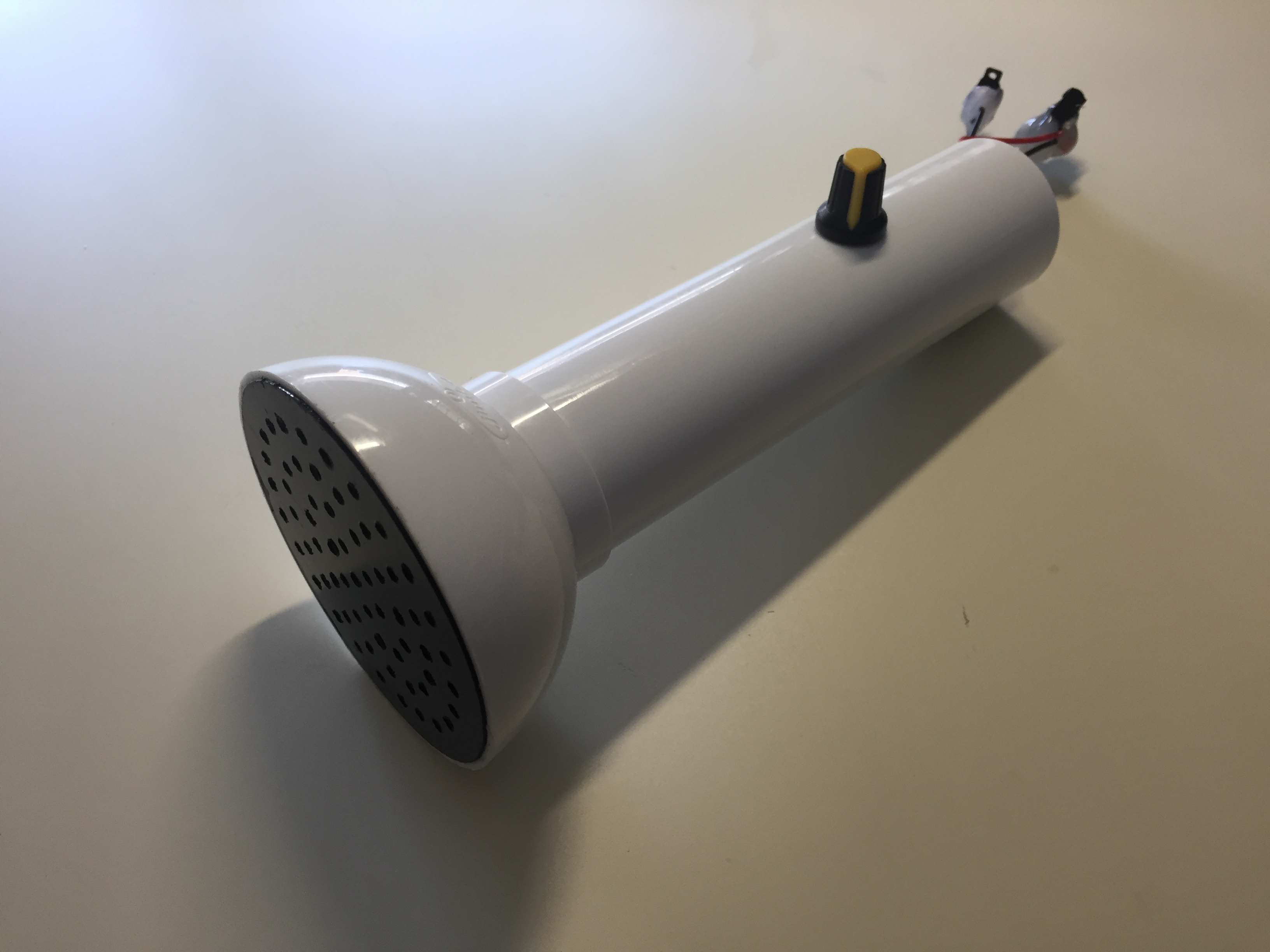
He terminado un megáfono para regalarle a mi sobrino de tres años y que se dedique a gritar todo lo que quiera por él.
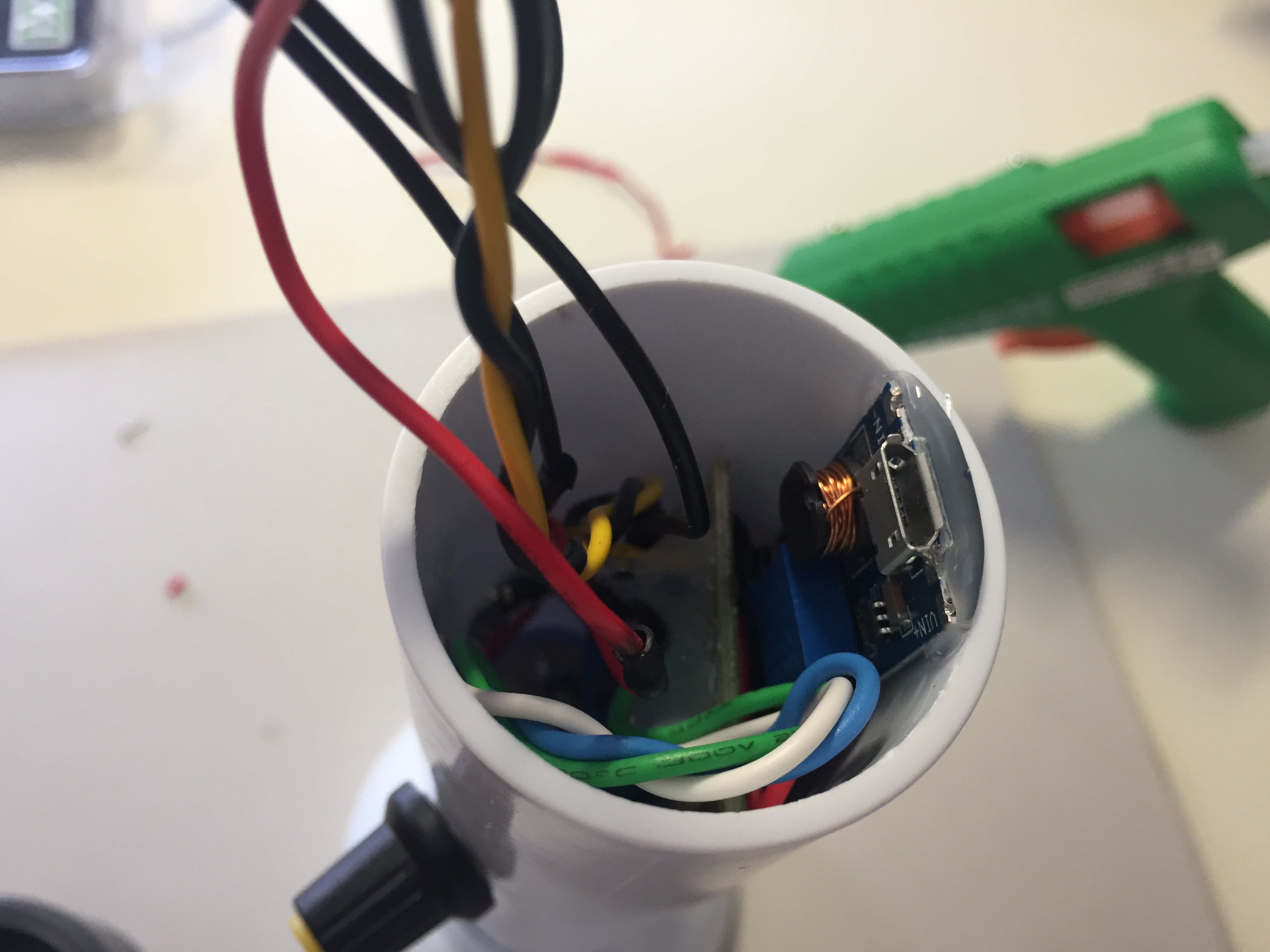
La idea es tener un juguete al que habla o grita por un lado y se amplifica por el otro (un megáfono). También le añado un conector de audio por si se quiere poner unos auriculares, y un potenciómetro para regular el volumen. Empleará unas baterías de ión litio recuperadas de la batería de un portátil, y se podrá recargar con un conector micro USB.
Lista de la compra:
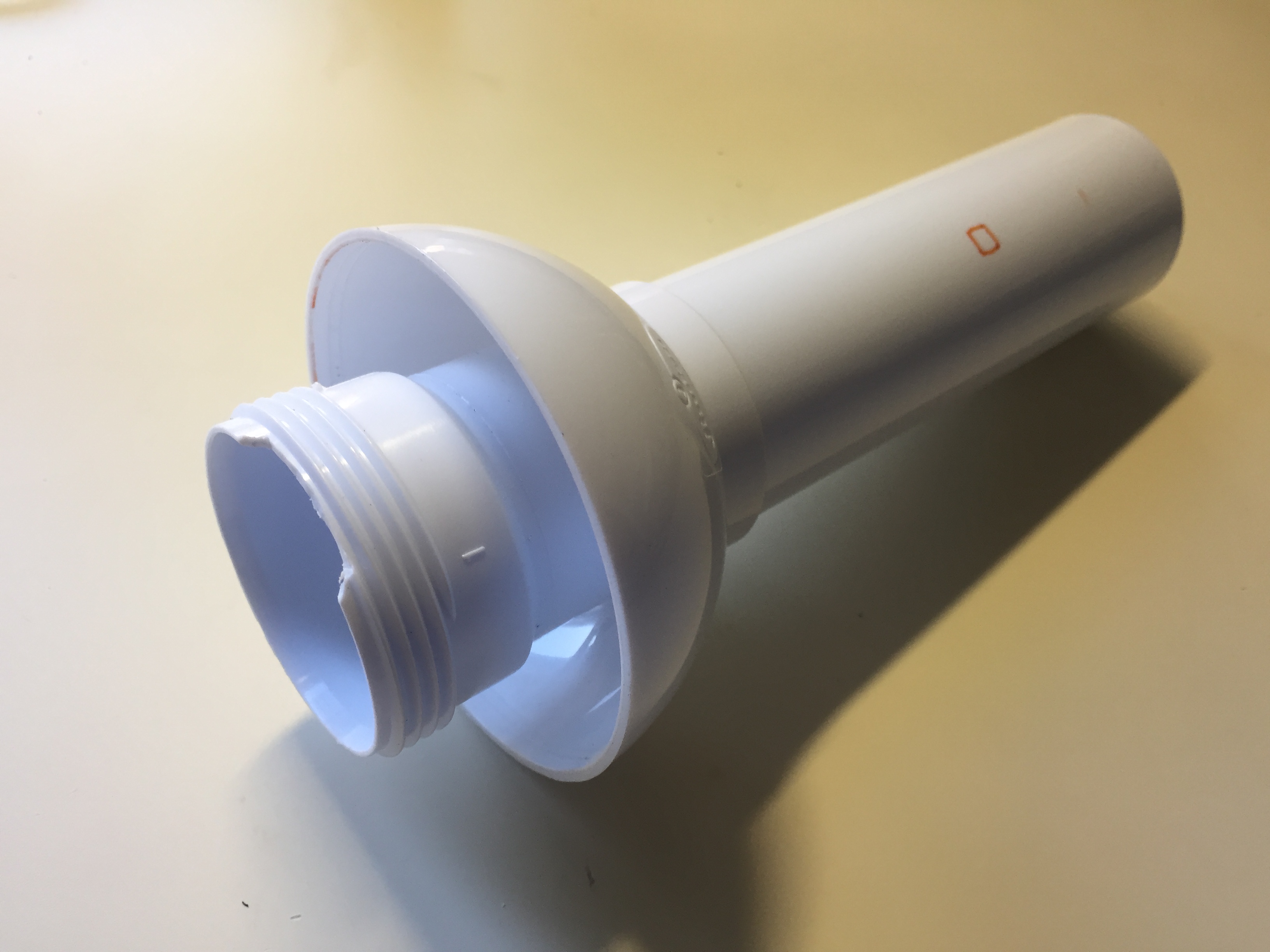
Tubo de PVC diámetro 40 mm, con embellecedor (acoplamiento a pared para sifones). Comprado aquí por 3.50 €, aunque hubiera valido cualquier tubo, vaso de plástico, etc.
Amplificador audio LM386. Comprado aquí por 6 € (porque tenía prisa), pero si se quiere esperar unas semanas, puede venir de China por 1.19 €.
Potenciómetro con embellecedor (lo tenía por ahí). Realmente no es necesario, valdría el del kit LM386.
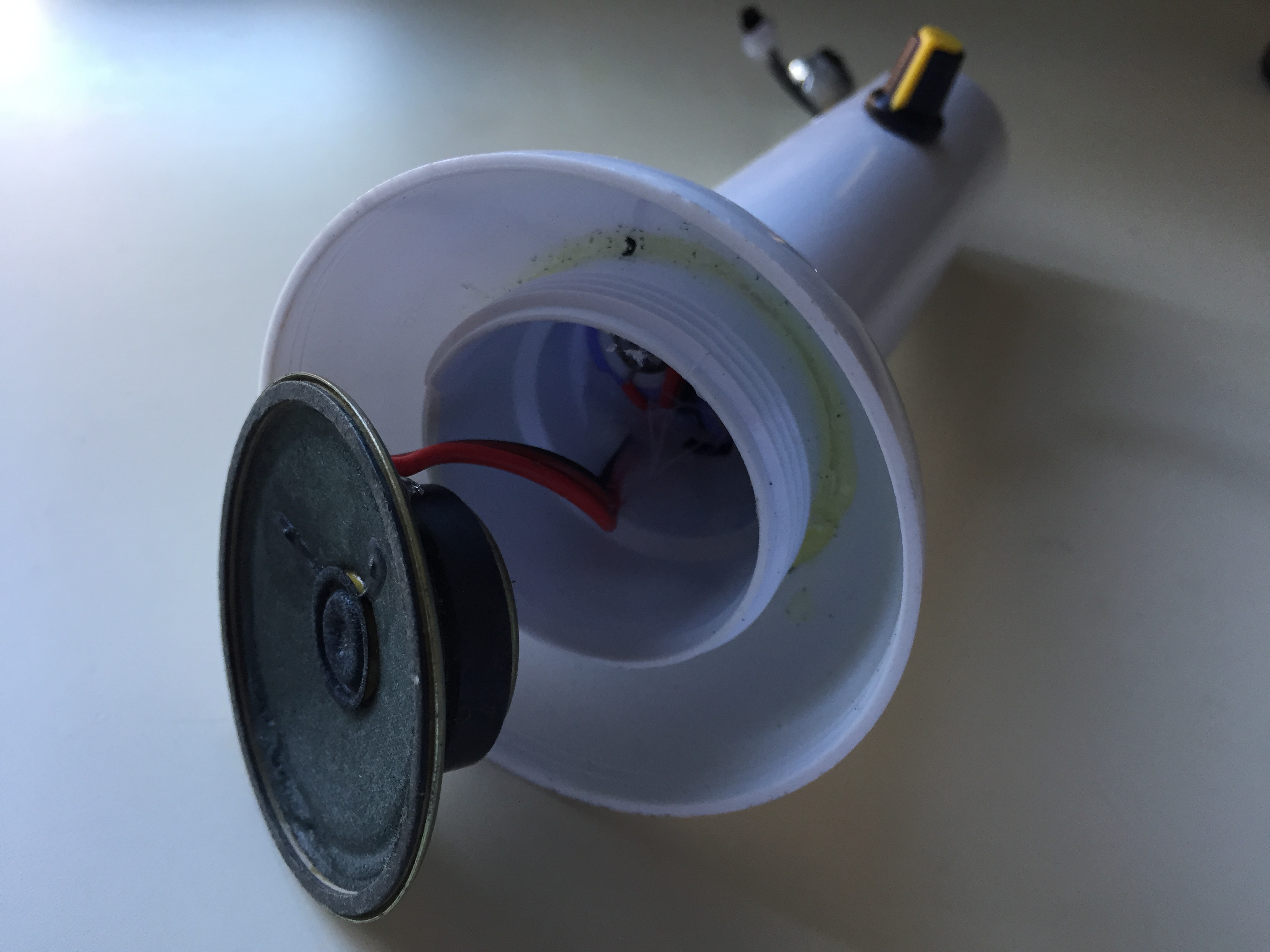
Altavoz 8 ohm reciclado de algún juguete (no recuerdo)
2 pilas 18650 extraídas de la batería de un portátil
BMS para 2 pilas 18650 en serie, comprado aquí por 2.25 €.
Módulo cargador de pilas de litio TP4056, comprado aquí (5 unidades por 1.99€; 0.40€ la unidad)
Convertidor DC-DC (Step-up) comprado aquí por 2.29 €.
Cables diversos, pegamento, etc…
Herramientas:
Soldador
Dremel (yo he usado uno que me fabriqué hace tiempo; ver esta entrada)
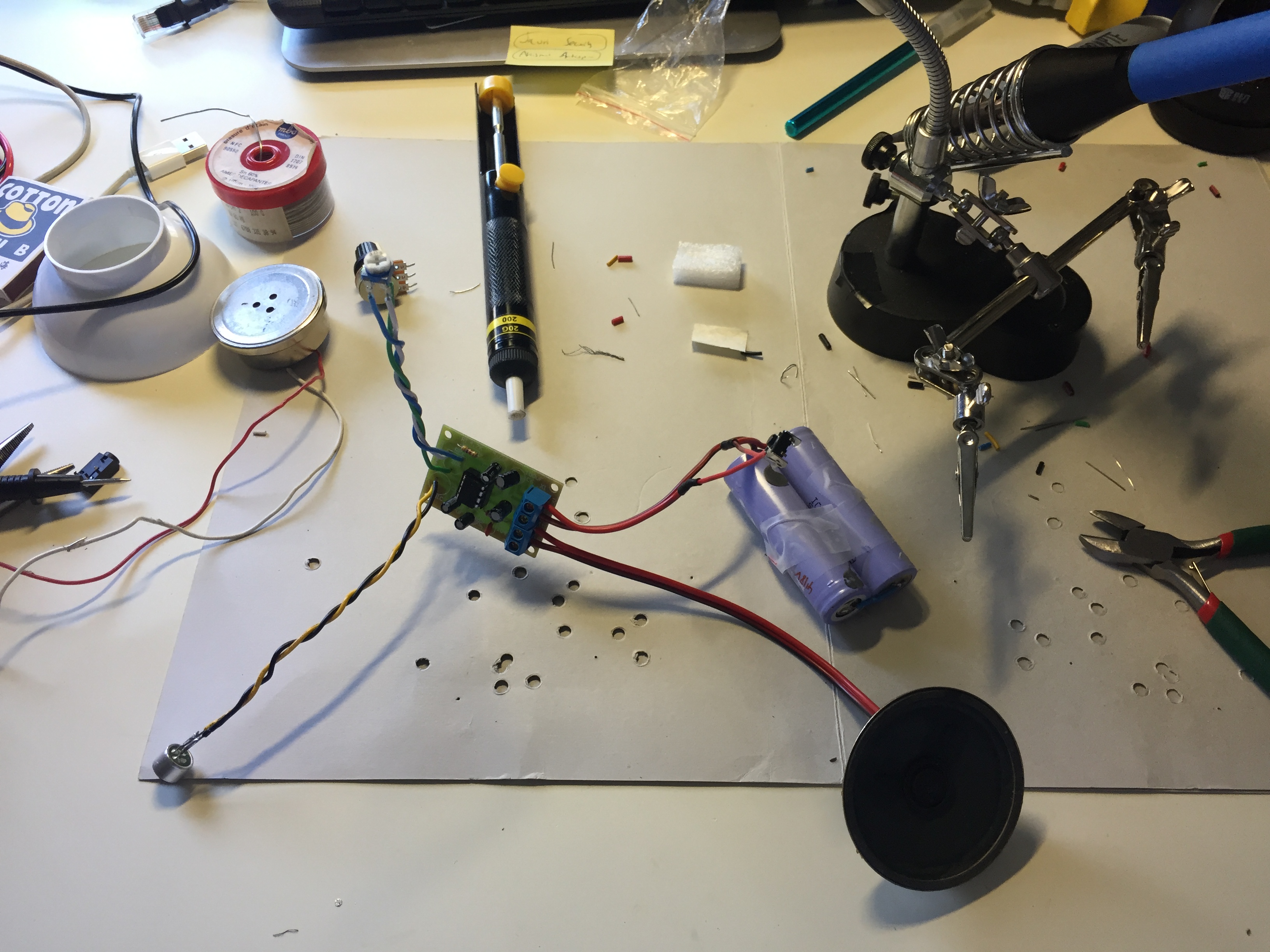
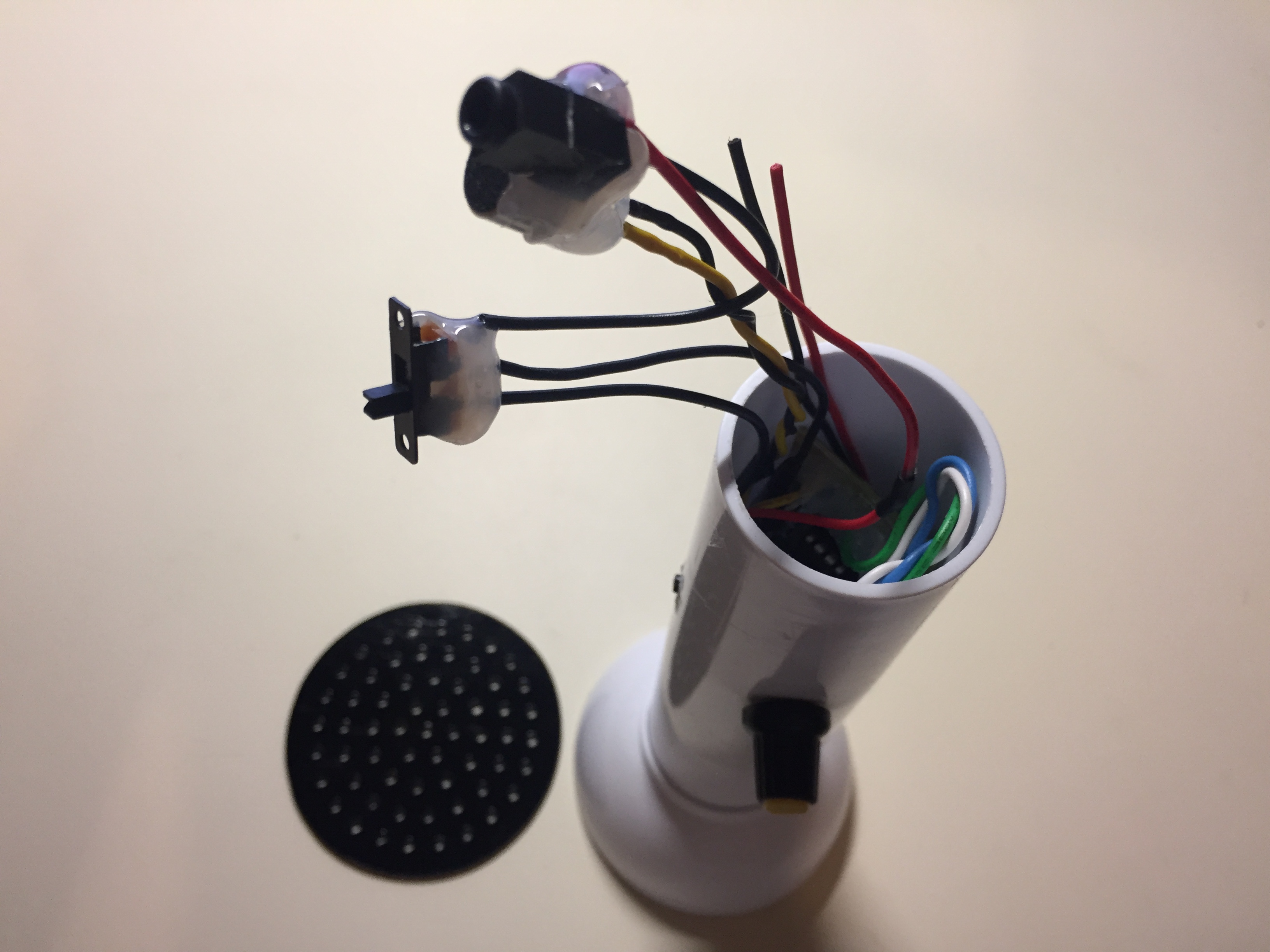
Algunas de las piezas antes de ponerme a montarlo todo:
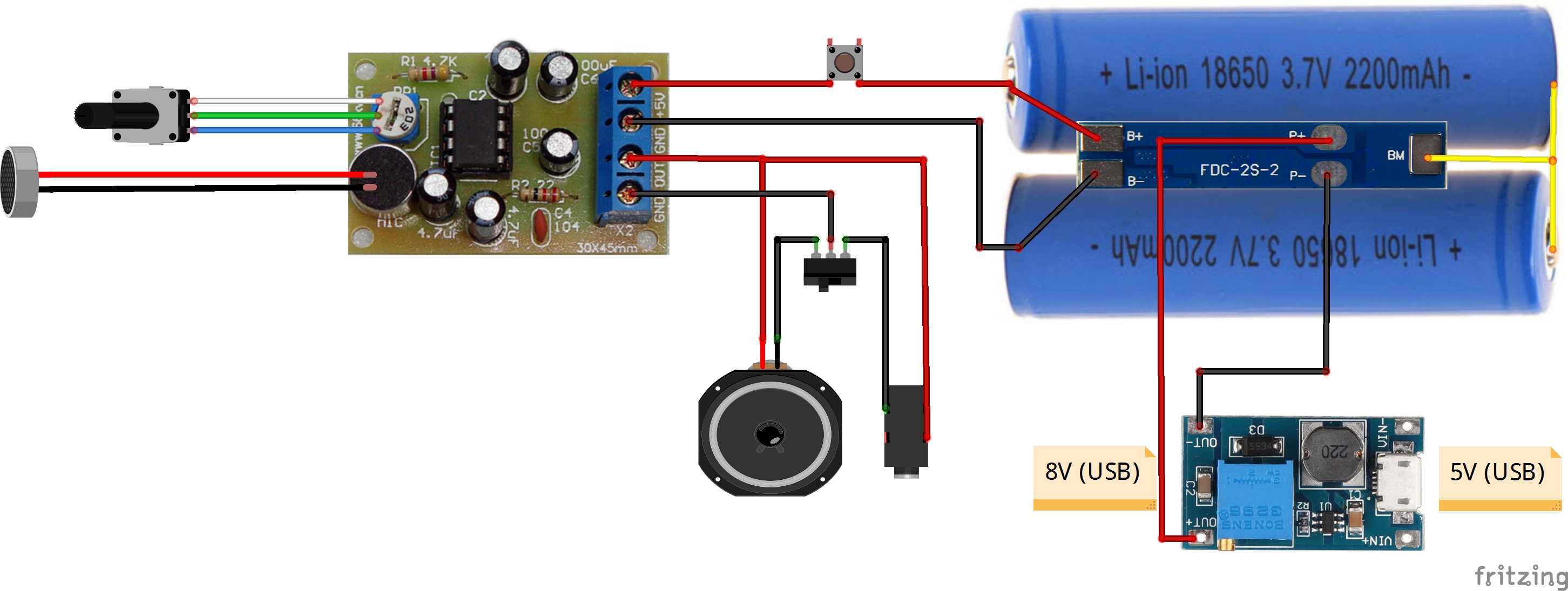
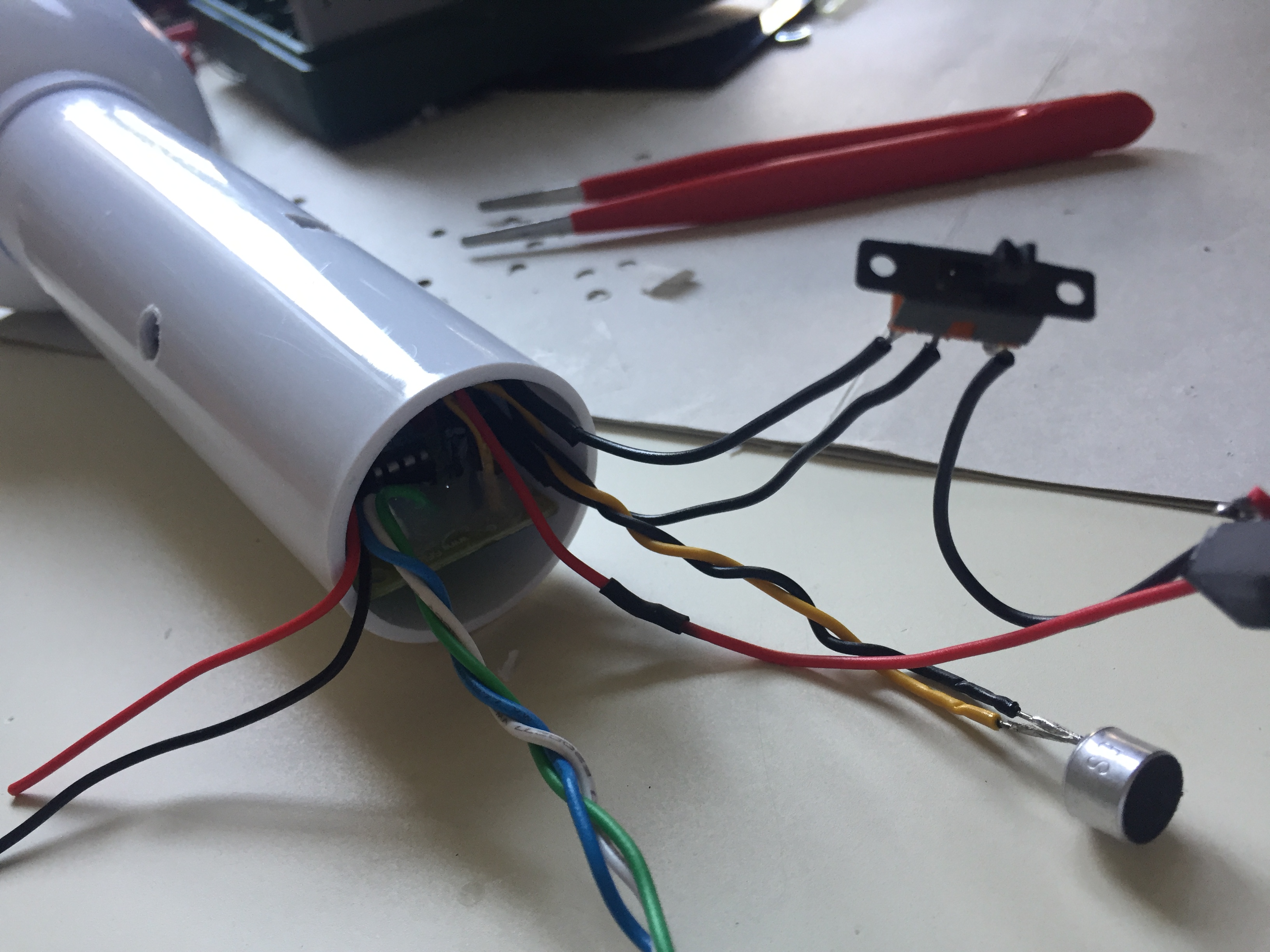
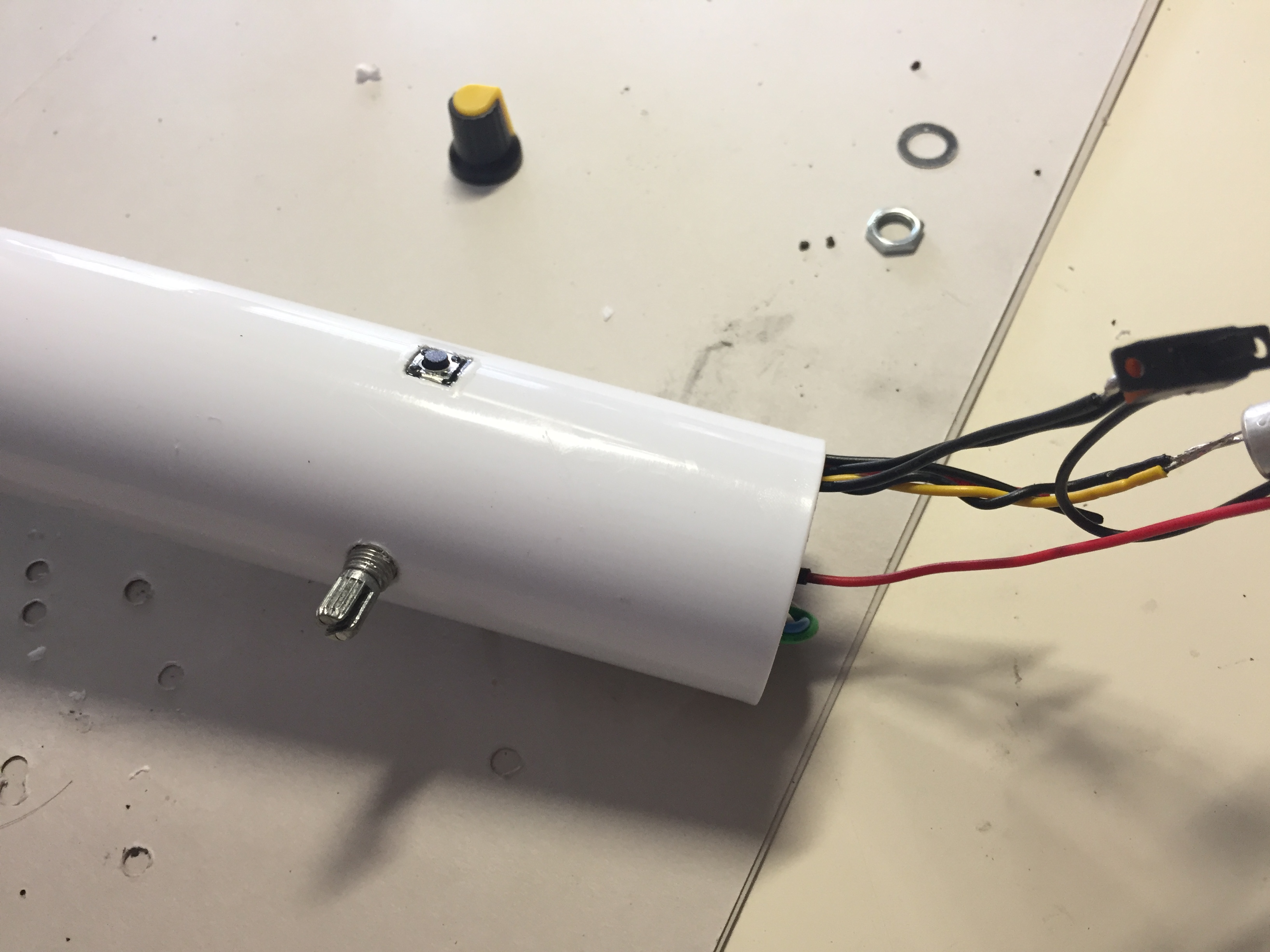
El esquema de montaje es el siguiente:
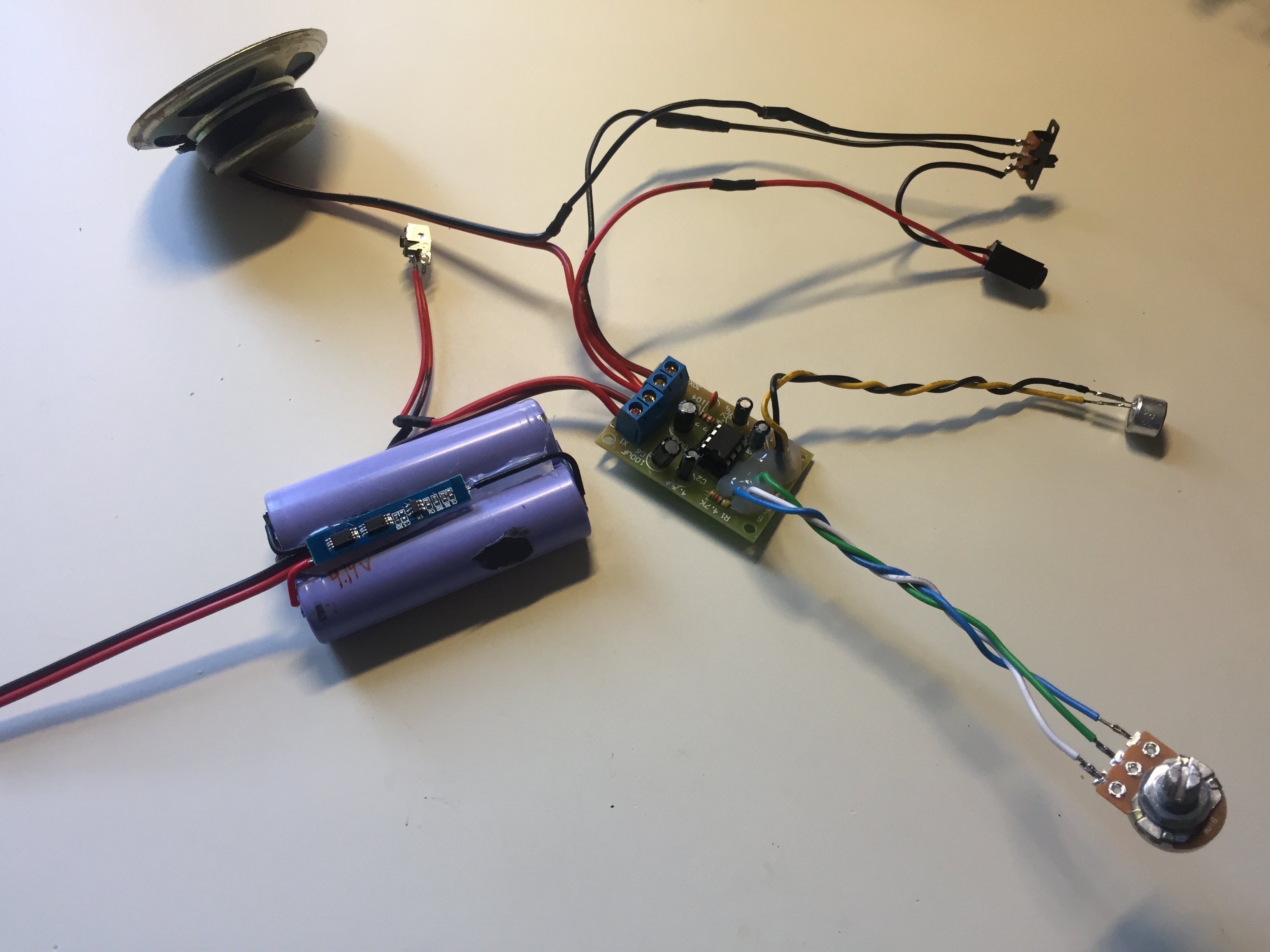
Todo montado, a falta del convertidor de voltaje, que aún no me había llegado:
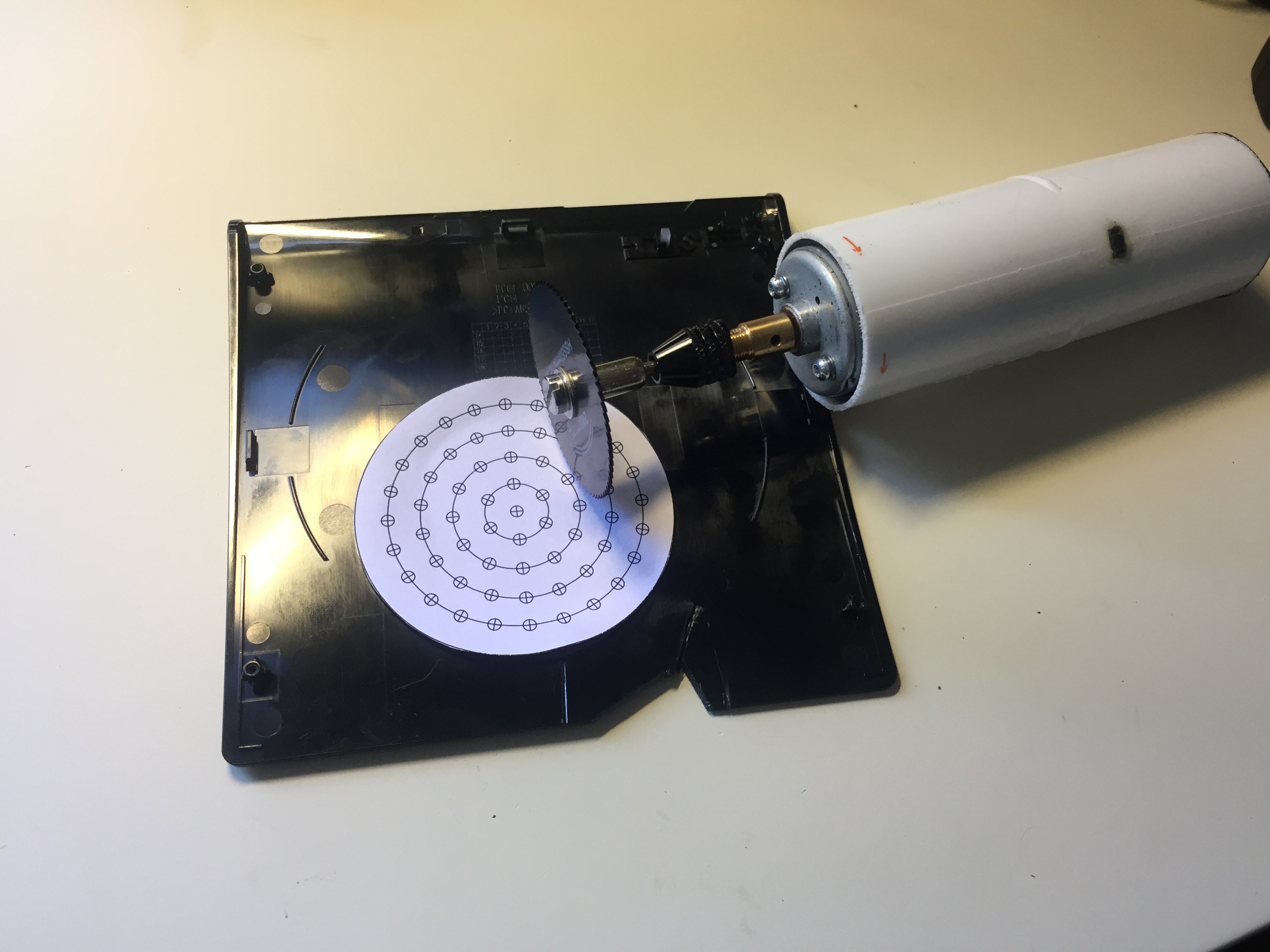
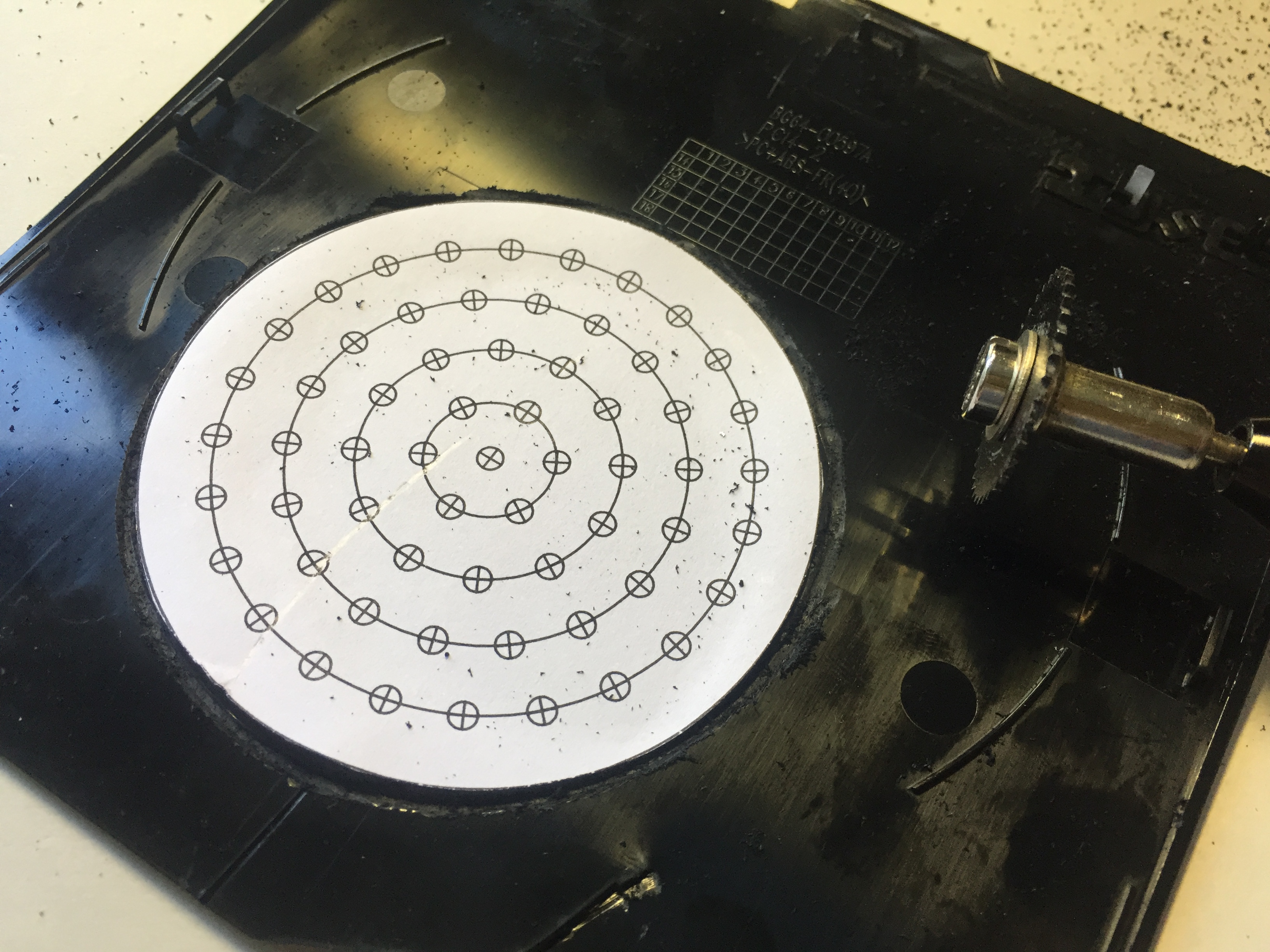
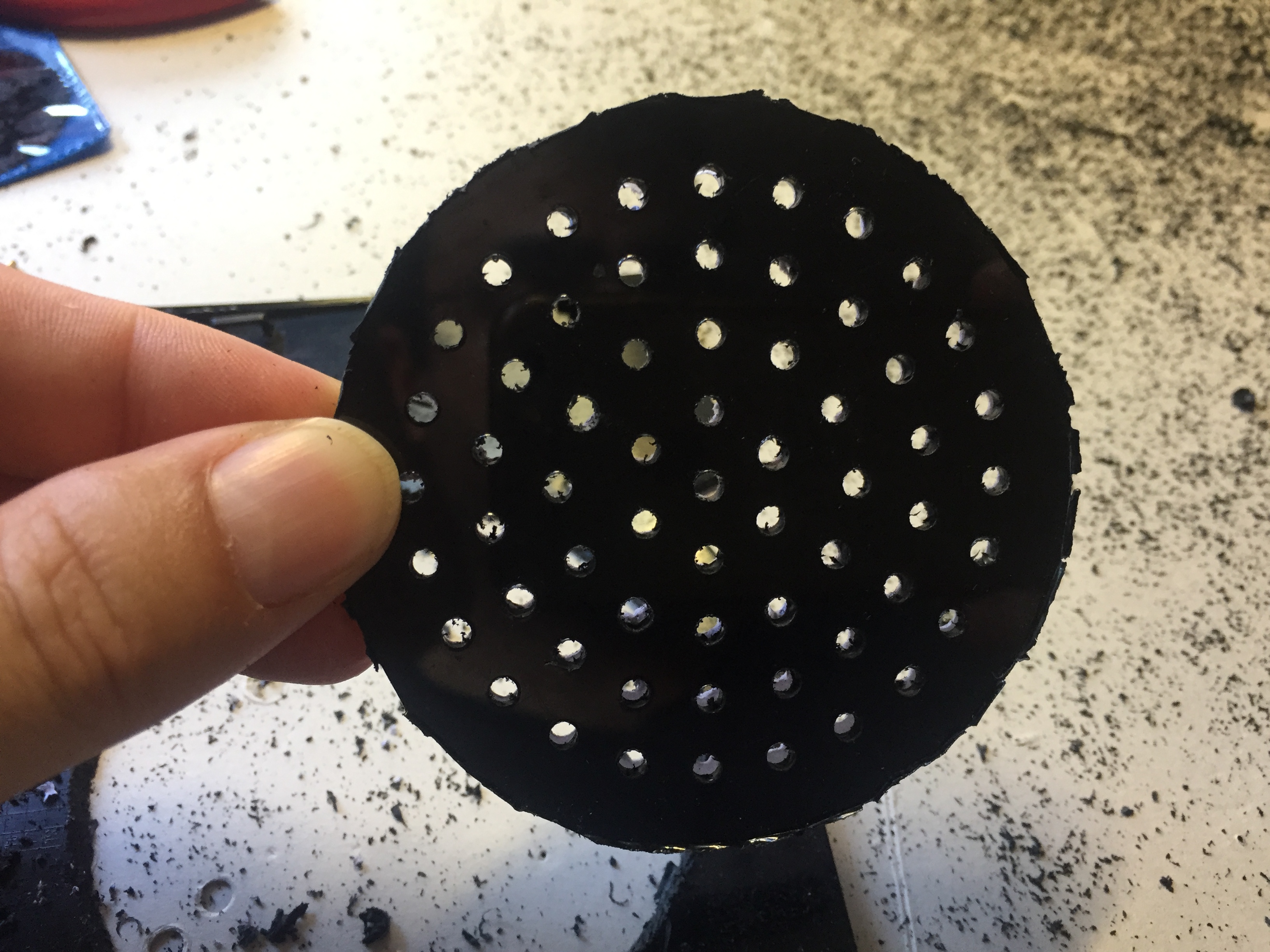
Hago la tapa a partir de un plástico cualquiera (de una tapa de un lector de DVD portátil que tenía por ahí), que corto del mismo diámetro que el embudo, y le hago unos agujeros para el altavoz, por medio de una plantilla:
NOTA: Hice este arreglo sin ánimo de lucro. No he cobrado ni cobro por el arreglo, ni permito su uso con ese fin. La autoría de la canción original es de Jimmy Page y Robert Plant.
Hace unos meses hice un arreglo para coro de Despacito, de Fonsi…
Colgué el vídeo del Sibelius en youtube, y ya es el vídeo más visto de mi canal, madre mía…
Me lo piden constantemente de todas partes del mundo, y me consta que lo andan montando varios coros. Un coro argentino, Camerata Vocalis Buenos Aires, de hecho ya ha colgado una grabación de mi arreglo en Youtube:
NOTA: Hice este arreglo sin ánimo de lucro. No he cobrado ni cobro por el arreglo, ni permito su uso con ese fin. La autoría de la canción original es de Erika Ender & Luis Fonsi.